



[첨단 헬로티]
커미조아에서 Closed Loop EtherCAT 스텝 드라이버 'EVS-ST01'을 출시했다. 커미조아의 EVS-ST01은 EtherCAT 네트워크 통신 기능을 갖춘 스텝 드라이버이다. EtherCAT은 고속 모션 제어 및 자동화 작업을 위해 고안된 개방형 산업용 이더넷 프로토콜이다. 또한, 엔코더 피드백을 통한 탈조감지 및 실시간 Steploss 보상을 실시함으로써 위치 명령에 대한 추종성을 보장한다.
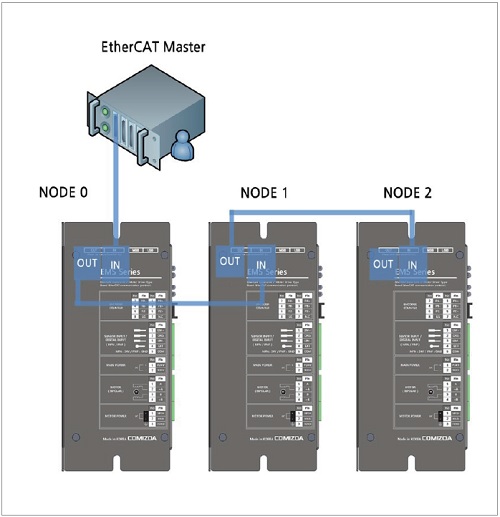
▲ 커미조아의 EtherCAT 네트워크 통신 구조

주요 특징
1. 2상 마이크로스테핑 드라이버
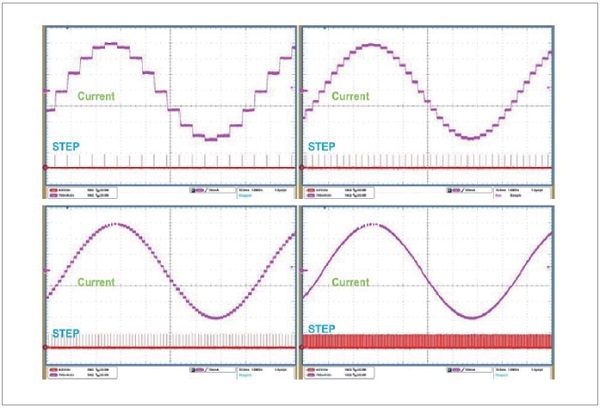
• Built-in 1/256-Step Microstepping Indexer를 지원한다.
• Adaptive blanking time 및 자동 혼합 감쇠모드(auto-mixed decay mode)를 포함한 다양한 전류 감쇠 모드를 사용하여 매우 부드러운 모션 프로파일을 구현한다.
• BEMF 출력(옵션) 및 엔코더 피드백(Encoder Feedback)을 통한 탈조 감지 및 실시간 Step-loss 보상(Compensation)한다.
• 보호 및 진단 기능을 지원한다.
- 과전류 보호(OCP, Overcurrent Protection)
- 과열 차단(OTS, Overtemperature Shutdown)
- 저전압 차단(UVLO, Undervoltage Lockout)
2. EtherCAT 기반 모션 제어
• EVS-ST01은 고속 이더넷(100Mbps, Full Duplex) 기반 산업용 Fieldbus인 EtherCAT을 지원하는 스텝핑 모터 제어 시스템이다.
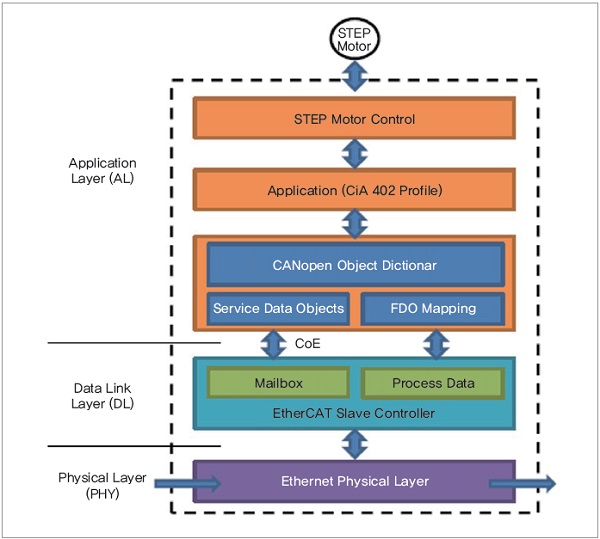
• EVS-ST01는 CAN Application Layer Over EtherCAT(COE)를 지원하는 EtherCAT Slave 모듈이다.
• CiA 402 Drive Profile을 지원하며, Cyclic Synchronous Position, Profile Position, Homing 모드를 지원한다.
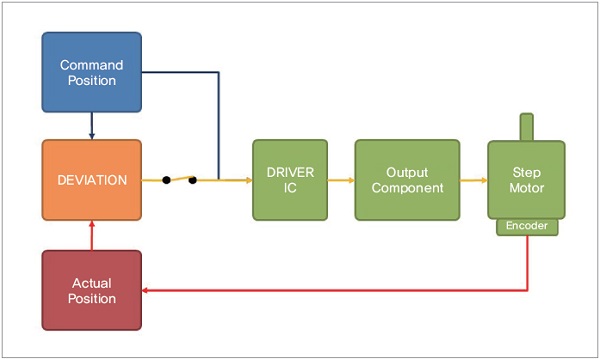
3. Closed Loop System
EVS-ST01이 엔코더가 장착되지 않은 스텝 모터와 연결되어 사용 시에는 개루프(Open Loop)로 동작되지만, 엔코더가 장착된 스텝 모터 사용 시에는 폐루프 제어 시스템(Closed Loop Control System)으로 동작할 수 있다. 폐루프 제어 시스템에서는 모터에 장착된 고정도 엔코더를 통하여 항상 현재 위치를 파악하고 있기 때문에 실시간 탈조 및 스텝 손실을 검출하고 필요시 위치 보정을 실시함으로써 정확한 위치결정을 보장한다.
4. No Gain Tuning
EVS-ST01은 기존 AC/DC 서보 드라이버와 달리 고정밀도의 위치결정을 위해 복잡한 제어로직을 구성하지 않으므로 시스템이 간단하고 복잡한 Gain Tuning이 불필요하다.
5. No Hunting
서보모터는 정위치(정지)에서 토크를 낮추고 정위치를 유지할 만큼의 토크가 인가되며 좌우로 위치편차가 발생하면 토크가 인가되어 미세진동(Hunting)이 발생한다. 반면, EVS-ST01은 정지 상태에서 높은 자기유지력(Holding Torque)을 가지며 움직이지 않으므로 미세진동이 없다.
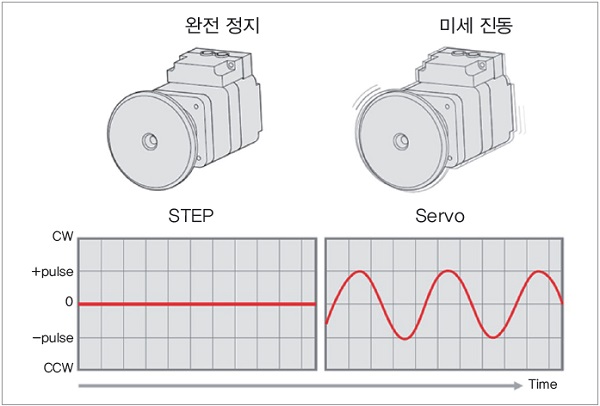
이러한 특징 때문에 비전 검사장비의 경우에는 서보모터보다는 자기유지력이 높은 스텝모터를 사용하게 된다.











































