



[첨단 헬로티]
필자가 뱀 로봇의 연구를 시작한 것은 1971년에 도쿄공업대학의 제어공학 전공 석사 과정에 입학했을 때부터이다. 대학(요코하마국립대학)에서는 기계공학을 공부했고, 졸업 연구는 그즈음 조교수였던 토도 이사오 선생의 밑에서 신뢰성공학의 최적화 문제를 연구했다.
대학 분쟁의 영향으로 연구 기간은 반년 정도로 짧았지만, 해외 논문에 실린 동적계획법으로 푼 신뢰성의 최적화 문제를 독자의 계산 알고리즘을 생각해 계산한 결과, 보다 정도가 좋은 해답을 유도할 수 있다는 것을 발견해 졸업 논문을 쓰기도 했다. 단, 이 방법은 나중에 최급강하법의 일종이라는 것을 알았기 때문에 대단한 연구는 아니었다.

이러한 해석적인 연구도 좋지만, 대학원에서는 뭔가 전혀 새로운 것을 만들 수 있는 연구를 하고 싶다고 생각했다. 마침 그즈음 도쿄공업대학 교수인 모리 마사히로 선생 등의 ‘로봇-그 기술과 미래’(NHK출판)을 읽었는데, 그 안에 나와 있는 ‘부드러운 기계’라고 하는 개념이 재밌다고 생각했다. 기존 기계의 개념과는 다르게 움직임의 정확성도 스피드도 없는 흐늘흐늘한 기계가 좋다는 이야기였다.
그래서 대학원은 도쿄공업대학에 진학하기로 하고, 모리 마사히로 선생의 제자로 당시 조교수였던 우메타니 요우지 선생의 연구실에 소속됐다. 처음에 필자가 받은 연구 주제는 패턴 인식에 관한 것이었다. 이것도 재미있는 부분이 있어 나중에 유사한 연구를 한 적도 있었지만, 당시에는 그다지 재밌다고 생각하지 않았다. 또한, 우메타니 연구소에서는 전년도의 졸업 연구로서 뱀에 관한 연구를 하고 있었는데, 이제 더 이상은 하지 않는다는 것이었다.
그래서 필자 자신이 흥미를 가질 수 있는 다른 연구 주제를 여러 가지 생각했다. 그러나 계속 신경이 쓰였던 것은 중지된 뱀에 관한 연구였다. 뱀 모양의 로봇을 만들면 부드러운 기계의 기본형이 될 것이며, 애초에 뱀 자체의 운동 해석도 초보적인 역학 해석밖에 되어 있지 않다는 것을 조사해서 알게 되었으므로(아마 현재도 필자 이상으로 상세한 해석과 실험을 한 것은 세계적으로도 없을 것이다) 대학에서 공부한 기계공학의 방법론을 구사하면, 오리지널 연구를 완성할 수 있을 것이라고 생각했기 때문이다.
이에 필자 나름대로 해석을 진행했다. 뱀의 몸으로 가정한 스프링에서 구부러지도록 한 링크의 관절부에 롤러를 장착, 그것을 뱀의 꾸불꾸불한 곡선과 유사한 홈 속에 넣으면 어떻게 움직일까와 같은 관찰 등도 했다. 그 결과, 뱀의 몸을 따라 작용하는 근력이 뱀의 추력과 지면을 미는 힘으로 어떻게 변환되는지의 기초 운동 방정식을 유도할 수 있었다. 이것이 연구실에 소속되어 2개월 정도 지났을 때였다. 이때 우메타니 선생에게 계산의 도중 경과를 보고하고 뱀의 연구를 하고 싶다고 제안한 결과, 승낙을 받았다.
줄무늬뱀을 사용한 실험
그래서 실험적인 검증을 하기로 했다. 이러한 종류의 동물실험에는 움직임이 민첩한 줄무늬뱀이 적합하므로 1971년 6월에 시부야 미야마스 언덕 밑에 있었던 괴상한 뱀요리집에 줄무늬뱀을 사러 갔다. 주뼛주뼛 가계에 들어가 야채볶음이 될 뻔한 운명의 줄무늬뱀 6, 7마리를 구입했다. 한 마리에 1500엔이었다. 뱀을 지하철 도큐선 내에 가지고 들어가도 될지 우메타니 선생에게 상의했더니, 선생이 자신의 차를 가져와서 그 차로 도쿄공업대학으로 가지고 돌아왔다. 사진 1이 구입한 줄무늬뱀이다.
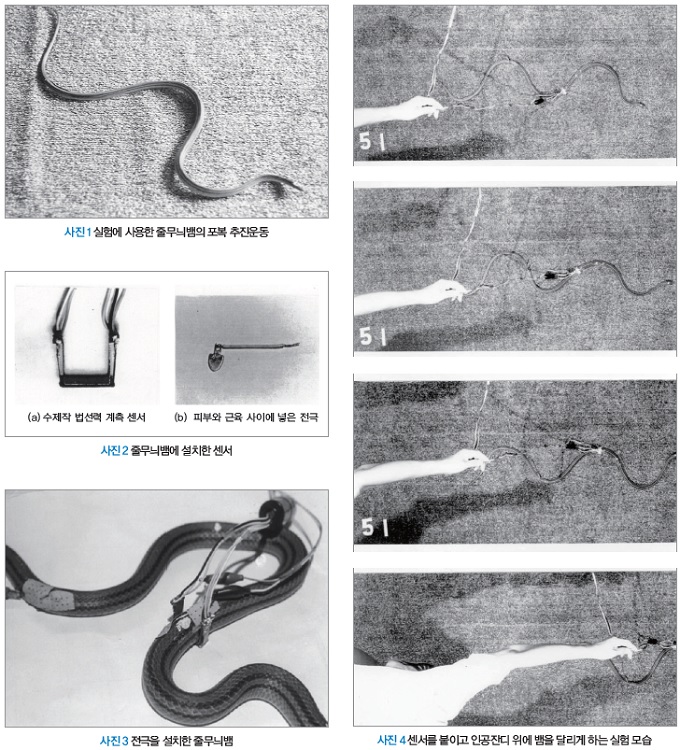
뱀이 지면을 미는 힘의 계측법은 여러 가지 생각한 결과, 바닥면에 계측기를 설치하는 것이 아니라, 뱀의 몸에 작은 계측기를 붙이는 방식으로 했다. 사진 2(a)가 시제작한 ‘법선력 계측장치’이다. 이것을 뱀의 배판 일부에 끼우면, 그 부분의 배판이 수 mm 지면에서 떠오른다. 그렇기 때문에 뱀이 활주 중에 가로방향으로 힘(법선력)을 내면 배판을 지지하는 판스프링이 미묘하게 구부러지고, 판스프링에 붙인 변형게이지로 법선력을 계측할 수 있다는 것이다. 이 측정법의 좋은 점은 계측점은 뱀의 배판 1군데인데, 그곳이 포복 추진 중에 몸 형태를 따라 움직이기 때문에 몸 형태 전체의 법선력 분포를 계측할 수 있다는 점이다.
또한, 뱀이 추진 중에 내는 근력은 근전류로 측정하기로 했다. 근전류의 계측법으로서는 침전극법과 표면전극법이 있는데, 근육에 침을 찔러 근전류를 계측하는 침전극법은 전류가 너무 작고, 피부 상에 전극을 붙이는 표면전극법도 뱀의 비늘이 방해가 되어 계측할 수 없었다. 그래서 아마추어 발상으로 사진 2(b)와 같은 전극을 동판으로 만들고, 뱀의 피부를 잘라 피부와 근육 사이에 삽입하는 좀 거친 방법을 시도했다. 결과는 양호해서, 피부와 근육 사이의 도전성 체액의 도움으로 충분한 신호를 계측할 수 있었다.
이러한 계측기를 줄무늬뱀에 설치했다(사진 3). 근전류 계측용 전극을 반창고로 붙인 부분에 법선력 계측계를 설치했다. 떨어진 곳의 반창고는 근전류용 접지 전극이다. 이렇게 센서를 설치한 줄무늬뱀을 사진 4와 같이 인공잔디를 깔아 놓은 활주면에 달리게 하고, 위에서 활주 체형을 연속 촬영했다.
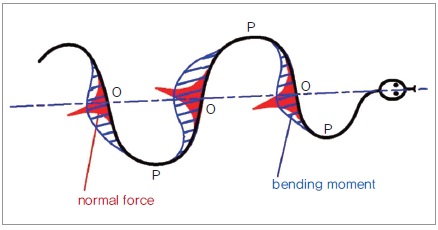
그림 1. 계산 결과 얻어진 근육의 분포와 지면을 미는 법선력의 분포
필자의 계산으로는 뱀이 서둘러 도망치려고 활주하면, 그림 1과 같이 몸통의 근육 분포는 산 모양의 곡선이 되고 지면을 미는 법선력은 O점 주변에 집중하는 분포가 되는 결과가 나오게 되어 있었다. 정말일까 하고 생각했지만, 그림 2와 같이 뱀의 활주 데이터에 그러한 경향이 실제로 관측되어 놀랐다.
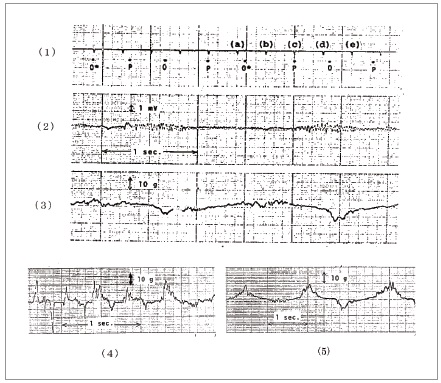
그림 2. 뱀 활주 시의 근전류와 법선력의 분포
(1) 0.25초마다의 펄스, OP점, 사진 4에 대응하는 자세
(2) 근전류의 데이터
(3) 법선계의 데이터
(4) 고속 포복 추진 시의 법선력 데이터 1
(5) 고속 포복 추진 시의 법선력 데이터 2
또한, 이러한 뱀을 사용한 활주실험은 목조의 낡은 실험실에 틀어박혀 거의 혼자서 했다. 실험실 바닥에 뱀이 달릴 수 있게 인조잔디를 깐 활주면을 만들고, 활주면 주위에는 알루미늄판을 세워 조명을 비춰 밝게 하고 일부분만 어둡게 해 둔다. 그리고 뱀을 이 활주면에 두고 지면을 치면, 어두운 곳을 향해 도망간다. 이때의 활주 상태를 위에 설치한 카메라로 연속 촬영하면서 계측하는 실험을 반복한 것이다(사진 5).
사진 5. 뱀의 계측장치와 뒤에 있는 알루미늄판으로 둘러싸인 인공잔디
실험 중에 이런 에피소드도 있었다. 뱀을 달리게 한 후, 다음 실험을 위한 세팅을 할 때에 뱀을 일일이 다시 바구니에 담는 것은 귀찮았다. 그래서 왼손으로 뱀의 머리를 잡으면서 뱀을 목에 감고, 오른손으로 계측장비 세팅 등을 했다. 이렇게 실험하던 중에 연구실에 새롭게 부임된 비서가 인사를 하러 왔다. 그래서 잠시 동안 서서 이야기를 했다. 비서는 기분 좋게 이야기하고 있었는데, 마침 그때 목에 걸고 있던 뱀이 조금 꼬리를 흔들었다. 그것이 뱀이라고 알게 된 순간, 비서는 “꺄악~” 소리치면서 실험실에서 뛰어나갔고 그 후에는 실험실에 결코 오지 않게 됐다. 이와 같이 뱀의 동물실험을 계속했다. 이 연구 성과는 2019년 8월에 정리해 같은 해 11월에 이즈의 유미가하마에서 개최된 바이오메커니즘 심포지움에서 발표했다.
뱀은 왜 몸의 일부를 띄우고 활주하는가
필자가 이런 실험을 반복하고 있을 즈음, 실험실의 선배와 차를 마시면서 이야기를 나눈 적이 있었다. 그때, 사진 1을 보이자 선배인 시노다 씨가 “뱀은 활주 중에 몸의 일부를 띄우는 구나”라고 아무렇지 않게 말했다. 이것을 들었을 때 “오~!”하고 감격했다. 필자는 지금까지 눈치 채지 못했지만 확실히 떠 있었다. 게다가 이와 같이 뱀이 몸의 일부를 띄우는 행동은 필자가 유도한 역학으로 매우 잘 설명할 수 있다는 것을 순간적으로 알았기 때문이다.

사진 6. 세계에서 최초로 뱀과 동일한 원리의 포복 추진을 실현한 뱀 모양 로봇 ACM Ⅲ
그것은 이런 것이다. 뱀이 효율적으로 근력을 추진력으로 변환하려고 하면, 지면을 그림 1과 같이 O점 주변에 집중해 가로로 밀게 된다. 그렇기 때문에 뱀은 추진운동 중에 O점 근처에서 가로로 미끄러지기 쉽다. 그러나 마찰계수는 바꿀 수 없다. 그래서 뱀은 가로로 작용하는 힘이 작은 O점 이외의 몸을 띄워 체중을 O점 부근에 집중시키고, 그것으로 O점에서 미끄러지는 것을 막으려고 한다. 그렇게 하면 이런 활주 체형이 된다는 이론이다. 또한, 이 활주법은 이후 Sinus-lifting이라고 불렀는데, 실제 뱀에 가까운 뱀 모양 로봇을 융단 등의 마찰력이 큰 지면에서 달리게 할 때에는 필수적인 주행법이 됐다.
뱀 모양 로봇 제1호의 개발
사진 6에 나타낸 전체 길이 2m로 전체 20절의 뱀 로봇을 만들기 시작한 것은 필자가 석사 과정 2년째였던 1972년 9월부터였다. 20절이었기 때문에 부품도 모두 20개 단위로 만들게 되어 매우 힘들었지만, 손재주가 있어서 설계 시작부터 완성까지 3개월 정도로 가능했다. 지금까지 해보지 않았던 종류의 전자회로에 대해서는 이시다 아키나리 조교(현 의과 치과대 명예교수)에게 배워서 만들었다.
그리고 1972년 12월 26일에 첫 활주실험에 성공했다. 그때의 모습은 다음과 같았다.
‘뱀 모양 생물기계 ACM III에 전원을 넣는다. 장소는 책상을 정리해 넓게 만든 제도실이다. 바닥에 놓인 밝은 조명에 비춰진 알루미늄과 모터 덩어리 같은 ACM III가 움찔하고 반응, 서보 모터의 동작음이 시작된다. 때때로 신호선을 탄 잡음에 반응해 ACM III의 동체가 미묘하게 떨린다.
동시에 진동 이송의 구동회로를 켠다. 그러면 회로 기판 상의 총 40개의 리드 릴레이가 맥동과 같은 리드미컬한 소리를 내기 시작한다. 실험 시작 후 곧바로 고장이 나 버릴지도 모르기 때문에 만약을 위해 준비한 촬영기도 스타트.
다음으로 함수 발생기의 정현파를 선두 절에 보내는 스위치도 켠다. 그러자 ACM III는 끝단에서 꾸불꾸불 사행운동을 하기 시작한다. 몸의 절반 정도가 사행 물결 모양이 되면, 천천히 ACM III는 전진을 시작하고 깨끗한 포복 체형을 취하면서 바닥 위를 활주하기 시작한다.
알루미늄 바탕이 다 들어난 기계가 움직이기 시작하는 것만으로, 과연 살아있는 생물 같은 부드러운 기계로 변신할 것인가!’
필자는 이후에도 많은 로봇을 제작했지만 필자에게 있어 첫 번째 로봇이었던 이 ACM III는 거의 모든 부품을 직접 만들어 조립했으며, 움직이기 시작하면 매우 동물적이었기 때문에 특별히 애착이 더 깊다. 이 ACM III는 현재 도쿄공업대학의 백년기념관 박물관에 전시되어 있다.
이 날의 실험에서는 조금 해프닝이 있었다. 그것은 똑바로 포복 추진하는 지령값을 부여했는데, 여기 저기 막 돌아다니는 것이다. 뭔가 자유의사를 가지고 움직이기 시작하는 것처럼 기분이 오싹했다. 조사한 결과, 동력계와 제어계의 접지가 연결되어 있지 않았기 때문에 전위가 흔들리고 있던 것이 원인이었다.
뱀의 운동 해석과 뱀 로봇에 관한 연구 성과는 이듬해 1973년에 이탈리아 우디네시에서 열린 국제회의에서 발표했다. 발표는 매우 높게 평가됐고, 저녁 세션에서 다시 동영상이 상영됐다. 이 뱀의 운동에 관한 생물역학적 연구와 뱀 로봇의 연구는 1976년에 학위 논문으로 정리했다. 그리고 그 후 ‘생물기계공학’(공업조사회, 1988 일간공업신문사 제4회 기술․과학도서문화상(최우수상) 수상)과 Biologically Inspired Robots(Snake-like Locomotor and Manipulator) (Oxford University Press, 1994 테시마 기념저술상 수상)을 저술했다.
그 후의 뱀 모양 로봇의 전개
그 후 여러 가지 뱀 모양 로봇을 개발했다. 사진 7은 수륙 양용 뱀 모양 로봇 ACM R5이다. 2005년 아이치 만국박람회에 전시한 것이다. TV 프로그램에서 소개하기 위해 도쿄공업대학의 수영장에서 수영시켰을 때에는 NHK의 사진기자가 카메라를 물속에 넣고 촬영을 하면서 “대단하다 대단해”라며 놀라워했던 것이 인상적이었다. 이것은 그 후 후쿠시마 제1 원전의 내부 탐사용으로 개량하기도 했다.

사진 8은 능동적으로 구부러지는 몸통뿐만 아니라, 반구 모양의 바퀴도 능동적으로 해서 운동성을 높인 뱀 모양 로봇이다. 완전 방진 방수이며, 각 관절에는 토크 센서와 과부하 보호장치가 설치되어 좁은 잔해 속의 형상에 적응해 이동할 수 있고 끝단과 뒷부분에 탑재된 카메라로 좁은 곳의 점검 작업이 가능하다. 이 로봇은 시미즈건설의 요청으로 후쿠시마 제1 원전 1호기 건물 내의 상황을 조사하기 위해 실제로 사용되고 있다.
사진 9는 직경 100mm의 가늘고 긴 관로에서 땅 속 20~30m에 내려뜨리고, 그곳의 배수관에 들어가 퇴적된 물과 진흙 속에서 내부 상태를 점검하는 실용형 뱀 모양 로봇이다. 이와 같은 소형 크롤러로 진흙 속을 들어가면, 벨트와 롤러 사이에 진흙이 들어가 곧바로 스턱되어 버리는데, 동 로봇은 실험과 기구 개조를 반복해 이 문제를 극복했다. 지하 수십 m의 배수 홈의 상태를 카메라로 점검하거나, IMU로 배수관의 지도 정보를 계측하거나 하는 등의 작업을 현재 하고 있다. 사진 9는 나리타 공항 근처의 타마천 모래밭에서 실시한 실험 모습이다.
사진 10. 부정형 물체를 부드럽게 파지할 수 있는 열구동형 그리퍼 (Soft Gripper Ⅲ)
이외에도 길고 유연한 뱀과 같은 로봇 암도 여러 가지 개발했다. 사진 10은 하나의 액추에이터로 다관절 그리퍼를 구동해 부정형 물체를 유연하게 파지할 수 있는 Soft Gripper III이다. 이 그리퍼에 대한 논문은 1978년에 Mechanism and Machine Theory지에 게재됐는데, 이 논문은 열구동형 로봇의 기원적 논문으로 인정받았으며 2017년에 ‘동 잡지 출판 이후 가장 많이 인용된 10개의 논문’ 중 하나로 선정됐다.

사진 11. 후쿠시마 제1 원전 1호기 내부 조사용의 전체 길이 4m로 늘어나는
뱀 모양 다관절 암 (시미즈건설과 공동 개발)
사진 11은 원전의 내부 조사용으로 시미즈건설과 함께 개발한 전체 길이 4m로 늘어나는 뱀 모양 다관절 암이다. 높은 방사선에 강한 CT-Arm(Coupled Tendon Drive Arm)이라고 부르고 있다. 와이어 구동형 암이다. 이 암을 넣은 케이스의 끝단부를 후쿠시마 제1 원전 1호기의 건물 내에 붙이고, 사진 12에 나타냈듯이 잔해 속에 몸통을 굴곡시키면서 들어가 내부 상황을 조사하기 위해 실제로 사용됐다.

사진 12. 뱀 모양 다관절 암이 1호기의 잔해 속을 탐색하고 있는 모습
이외에도 도쿄공업대학의 히로세 연구실 학생들과 창설해, 현재는 회장을 맡고 있는 하이봇에서는 원전의 폐로 작업뿐만 아니라 항공기 점검 작업을 하는 새로운 타입의 뱀 모양 다관절 암, 재해 현장에 들어가 조사를 하는 뱀 모양 이동 로봇 등 여러 가지 타입의 뱀 모양 로봇을 계속 개발하고 있다.
맺음말
필자는 학창 시절에 부드러운 기계를 만들고 싶다고 생각, 실제 뱀의 움직임을 실험적 해석적으로 연구해 현재에 이르기까지 여러 가지 타입의 뱀 모양 로봇을 계속 개발하고 있다. 이 글은 이들 중 특히 초기 시절의 추억을 회고시켜 주었다. 부드러운 기계는 앞으로 점점 더 그 적용 분야를 넓혀 갈 것으로 보인다. 이 글이 젊은 연구자들의 흥미를 불러일으켜, 이 분야의 연구를 가속시키는데 도움이 된다면 좋겠다.
히로세 시게오, ㈜하이보트, 도쿄공업대학 명예교수











































