[첨단 헬로티]
커미조아는 2019년 장비업체와 서보업체와의 기술제휴를 통한 철저한 사전 검토 및 필드테스트로 OHT(Overhead Hoist Transport) 컨트롤러(Controller)를 개발했다고 밝혔다.
OHT 모션제어기 플랫폼은 OHT를 제어하기 위해서 사용되는 제어기를 개발하기 위한 하드웨어 및 소프트웨어 솔루션을 말한다.

커미조아는 당사의 “OHT 플랫폼은 제어기에서 필요로하는 다양한 계측 및 제어 인터페이스를 제공하는 하드웨어와 OHT 제어에 필요한 기능을 정의한 다양한 소프트웨어 라이브러리를 제공하여 고성능 OHT 제어기를 단시간 내에 개발할 수 있도록 해준다.”며 “이 하드웨어 솔루션은 OHT 제어기로서 최적화된 구조로 구성되어서 그대로 양산 제품으로 사용할 수 있다.”고 말했다.
EtherCAT OHT Controller 프레임워크 특장점
◎ 전/후륜 Adaptive 동기제어 : 전륜과 후륜을 동기화하여 논리적으로 하나의 모터처럼 동시에 제어하는 기능으로 물리적으로는 2개의 모터가 제어되지만 논리적으로는 단축 제어명령을 사용하여 제어가 용이하다.
◎ 다단 가·감속 : 가·감속 구간을 여러 단계로 나누어서 가·감속도를 다르게 적용할 수 있도록 하는 기능으로 동일 가속도로 가속할 때에 속도에 비례하여 토크가 증가하게 되는데 특정 속도 이상에서 토크의 한계치를 넘어서는 경우가 발생할 수 있다. 이때 전체 가속도를 줄여서 토크 한계치를 넘어서는 것을 방지할 수는 있지만 그렇게 되면 가속 시간이 길어져서 주행 시간이 길어지는 문제 발생하는데 이러한 문제를 보완하기 위해서 가속 구간을 여러 단계로 나누고 각 구간마다 서로 다른 최적의 가속도를 지정하여 가속 시간도 최적화 하면서 토크 운용도 최적화하는 기능이다.
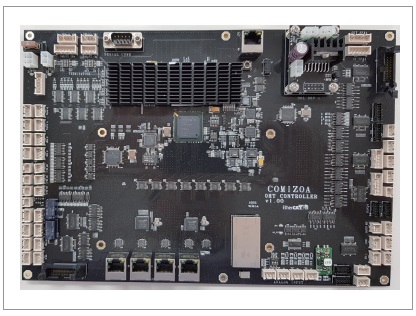
▲ 커미조아 EtherCAT OHT Controller
◎ 자유로운 저크 설정 : 가·감속 구간의 저크값을 다르게 설정 가능하며 저크의 시작부분과 끝부분 값을 서로 다르게 설정 가능하다. 또한 저크 값을 정의할 때 비율, 시간, 저크값의 세가지 방식으로 설정이 가능하다.
◎ 최소 가·감속 시간 제어 : 이송 거리가 짧은 경우에 가·감속 시간이 짧아져서 진동 발생할 수 있는데 가·감속 시간의 최소 시간을 보장하여 진동 발생을 방지할 수 있다.
◎ 속도, 위치 오버라이딩 기능 지원
◎ 슬라이딩 이송 모드 제공 : 이송의 마지막 부분에서 저속으로 이송하는 기능으로 속도의 연속성이 확보되어 부드러운 이송이 가능하며, 고속 및 저속 구간의 속도를 임의로 설정이 가능하다. OHT 호이스트의 Pick & Place 작업시에 유용하게 사용할 수 있다.
◎ 실시간 센서 감지 환경 : 타이머 인터럽트 서비스 루틴에서 센서 상태 감시 하는 기능으로 센서 감시 주기를 정확하게 유지할 수 있다.