



전자기기류의 경량·소형화, 고기능화가 진행됨에 따라 반도체 IC(Integrated Circuit)의 고집적화에 대한 움직임이 진행되고 있다. 이에 따라, ‘JEL 반송 로봇’이 취급하는 반송 워크도 박형화(薄型化)로 발전하면서 워크 자체의 변형도 커지는 경향이다. 이 워크를 지금까지 이상의 정밀도를 갖고 반송할 필요성이 나오고 있다.

▲ 사진 1. JEL의 Wafer 핸들링 시스템
개발 배경

기존 대표적인 워크의 유지방법으로는 ‘진공흡착 방식(그림 1)’, ‘Passive 방식(그림 2)’, ‘에지그립 방식(그림 3 및 사진 2)’이 있다. 이 같은 기존 방식들은 몇 가지 단점을 가진다.
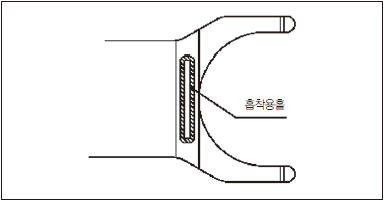
▲ 그림 1. 기존 ‘흡착 척’의 예
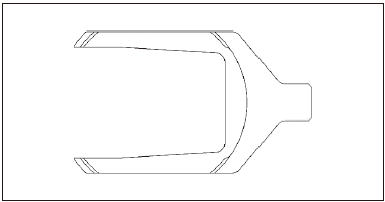
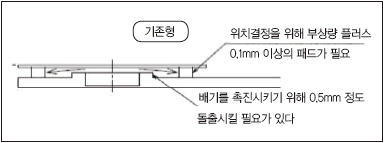
▲ 그림 2. 기존 ‘Passive 척’의 예
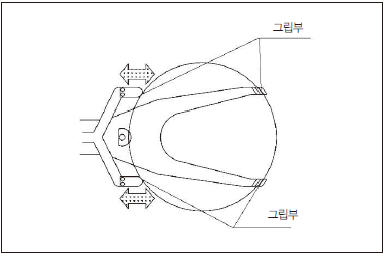
▲ 그림 3. 기존 ‘에지그립 척’의 예
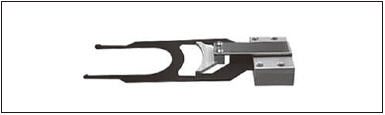
▲ 사진 2. 기존 ‘에지그립 척’의 예
진공흡착 방식은 흡착 유지 시, 면압력에 의한 응력 집중으로 워크의 손상이 커진다. Passive 방식은 가이드(홈)에 위치시키기 위해 워크를 단차 내에 가두어 반송하는 방식으로, 마찰을 유지해 워크의 미끄러짐을 억제하기 때문에 반송 속도가 낮아진다. 마지막으로 에지그립 방식은 워크 바깥둘레를 그립하기 위해, 그립하는 힘(홀딩력)이 워크 에지에 크랙을 발생시킬 위험이 있다.
위 방식에 따라 반송로봇에서 정확하게 반송되었다고 해도, 가장 중요한 워크물의 손상이 있다면 제품으로서 가치가 없기 때문에 반송 워크의 손상을 최소한으로 하는 핸들링 방법을 개발할 필요가 있다. 반송워크 손상을 최소화할 방법으로 베르누이(Bernoulli) 정리를 이용한 척을 소개한다.
제품화한 베르누이 척의 특징
1. 사이클론 방식
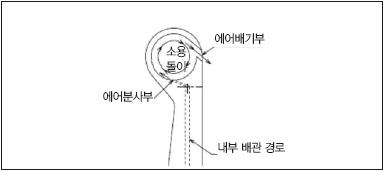
정압 에어(공급에어)가 원통부 측면에 있는 노즐에서 분출되어, 원통부 내부에서 선회류가 발생한다. 이 선회류가 반송 워크와의 틈새에 흐르게 하여 반송 워크를 부상시키는 구조다. 이 선회류의 작용으로 주위보다 압력이 낮은 부분이 발생하기 때문에 반송 워크를 빨아올리는 효과를 얻을 수 있다(그림4 동작 원리 참조). 이로 인해 흡착 응력에 의한 손상, 반송 시 미끄럼, 에지그립힘에 의한 손상을 방지할 수 있다.
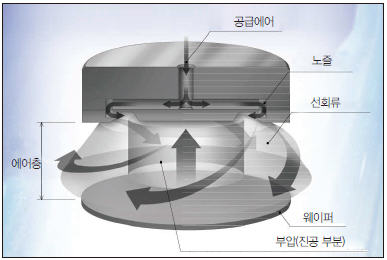
▲ 그림 4. 선회류 발생 유닛(사이클론 패드)의 동작원리
이 선회류 발생 유닛(사이클론 패드)을 임의의 플레이트 위에 여러 개 배치한 것을 ‘베르누이 척(Bernoulli Chuck)’으로 설계·제작한다(사진 3). 반송 워크를 어디에서 어떻게 반송하고 싶은지, 또 반송 워크의 사이즈와 질량에 따라 선회류 발생 유닛의 배치 위치와 수를 설계하고 결정한다.

▲ 사진 3. JEL ‘베르누이 척’
JEL 척에 배치했을 때, 유지력, 공기 유량, 공기 압력의 관계는 그림 5와 그림 6과 같다.
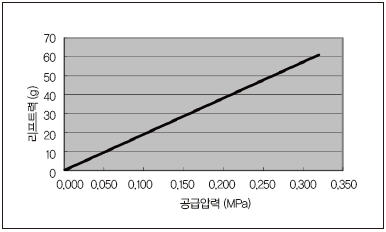
▲ 그림 5. 압력·유지력 관계도
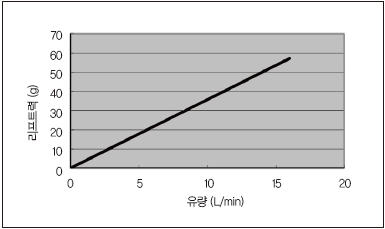
▲ 그림 6. 유량·유지력 관계도
2. 직분사 방식(특허 신청 중 : 일본)
척에 장착된 복수의 배기 노즐에서 직접 공기를 분류함으로써, 반송 워크 면 전체에 직접 분사가 골고루 퍼진다. 이 직접 분사로 워크 보유면의 압력이 낮아지는 ‘이젝터(Ejector) 효과’가 발생해 반송 워크를 빨아올리는 구조다. 반송 워크에 직접 접촉은 하지만 진공 흡착에 의한 반송과 에지그립에 의한 반송과 달리, 반송 워크에 면압이 적어 반송 워크의 손상을 막는 반송이 가능함과 동시에 휘어짐이 있는 경우도 확실한 반송이 가능하다.
3. 사이클론 방식과 직분사 방식 하이브리드형 (특허 신청 중 : 일본)
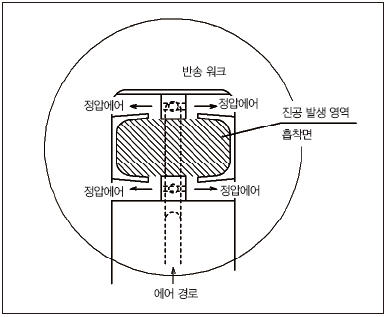
기본적으로는 사이클론 방식의 선회류 구조를 사용한다. 사이클론 방식에서 선회류를 발생시키기 위해서는 원통 모양의 홈을 이용해 그 안에서 발생한 선회류가 반송 워크 사이의 틈새에서 배출되는 부력과 부압과의 일정 밸런스로 부상시키는 구조다.
원통형 홈의 측면에 배기홈을 배치함으로써, 본래 반송 워크 방면으로 흐르는 공기를 측면에서 배기시킨다. 이로 인해 선회류의 부압만을 받는 것이 가능하다.
반송 워크에는 직접 접촉하는 곳이 있지만, 진공 흡착에 의한 반송과 에지그립에 의한 반송과는 달리, 반송 워크에의 면압이 적어진다. 때문에 워크 손상을 막는 반송이 가능함과 동시에 휘어짐이 있는 경우도 확실한 수송이 가능하다.
▲ 그림 7. 직분사 방식 ‘베르누이 척’ 구조도
▲ 그림 8. 사이클론 방식 측면 구조도
▲ 그림 9. 선회류의 배기구조(정면도)

▲ 그림 10. 선회류의 배기구조(측면도)
적용 사례
얇고 휘어짐이 있는 워크에 대한 손상을 최소한으로 하고 확실하게 반송하는 것을 목적으로 하고 있기 때문에, 탑재하는 JEL로봇 시리즈에 모두 탑재 가능하다.

▲ 사진 4. ‘베르누이 척’의 예

▲ 사진 5. ‘베르누이 척’ 탑재 로봇의 예 (트윈 암 로봇 STCR4160SN-300-CM 탑재)
베르누이 척을 탑재하기에 적합한 반송 워크 조건은 ▲워크의 두께가 얇고 부드러워 기존 진공 흡착에 의한 핸들링이 워크에 크랙 등 손상을 주는 경우 ▲기존 ‘Passive 척’ 핸들링에서는 반송 시 워크의 미끄러짐 현상부터 고속 반송에 한계가 있기 때문에 보다 고속으로 반송하고 싶은 경우 ▲워크의 두께가 얇고 부드러워 기존 ‘에지그립 척’ 핸들링이 워크에 크랙 등 손상을 주는 경우 등이다. <자료 : 인아코포, 일본 JEL 기술연구소>
정리 : 임근난 기자 (fa@hellot.net)











































