



[헬로티]
드론의 대명사라고도 할 수 있는 멀티 로터형 헬리콥터를 비롯한 회전날개 무인항공기는 지난 10년의 기술 발전을 배경으로 급속하게 사회에 침투하고 있다. 회전날개 무인항공기는 공중 정지 비행이나 수직 이착륙 등의 고정날개 기체에는 없는 비행 형태를 가지며, 현장에서 편의성이 뛰어나기 때문에 농업, 공중 촬영을 비롯해 측량, 점검, 조사, 경비, 물류 등 다양한 산업 분야에 응용이 기대되고 있다. 현재의 회전날개 무인항공기의 특징을 들면, ‘소형’, ‘전동', '자율', '멀티 로터’ 등의 키워드가 떠오르는데, 이러한 특징은 회전날개 무인항공기의 역사 속에서 처음부터 존재한 것이 아니라 주변 기술의 발전과 함께 서서히 얻게 된 것이다.
이 글에서는 이러한 회전날개 무인항공기의 기술 발전의 역사를 풀어, 현재의 소형 전동 자율 멀티 로터 기체에 이른 과정에 대해 설명한다. 이하에서는 무인항공기 전체 중의 회전날개 항공기의 위치와 그 기술적 특징에 대해 설명한다. 그리고 회전날개 무인항공기의 여명기인 1960년대부터 현재까지를 3개의 시대로 나눠, 각 시대의 회전날개 무인항공기 기술 발전의 역사에 대해 말한다. 그 다음으로는 회전날개 무인항공기의 최신 기술 동향을 설명하고, 마지막으로 이글을 정리하기로 한다.

회전날개 무인항공기의 개요
여기서는 무인항공기 전체 중에서 회전날개 무인항공기의 위치와 그 기술적 특징에 대해 설명한다.
1. 회전날개 무인항공기의 위치
무인항공기의 원형이 세상에 등장한 것은 라이트형제에 의한 세계 최초의 유인 동력 비행의 성공 이후 15년이 지난 1918년의 일이다. 1918년 3월 6일, 제1차 세계대전 중에 미국의 Elmer Sperry가 이끄는 팀에 의해 개발된 Curtiss-Sperry Flying Bomb이 거리 900m의 무인 비행에 성공한 것이 무인항공기의 시작이 된다. 그 후 1935년에 영국에서 개발되어 현재 드론의 어원이 됐다고 하는 세계 최초의 무인표적기(Target drone) DH.82 Queen Bee 등을 거쳐, 무인항공기는 주로 군사 분야에서 고정날개 항공기를 기반으로 발전해 갔다.
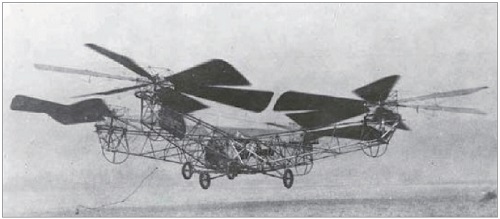
그림 1. 세계에서 가장 오래된 멀티 로터 헬리콥터
한편, 1920~30년대 회전날개 무인항공기는 아직 그 원형조차 존재하지 않았으며, 여러 가지 회전날개 유인항공기의 실험기가 개발되고 있는 단계였다. 개발된 실험기 중에는 그림 1에 나타낸 세계 최초의 멀티 로터 헬리콥터인 Jerome-de Bothezat Flying Octopus도 있었는데, 회전날개 기구의 복잡성과 제어의 어려움 때문에 현실적인 운용에 견딜 수 있는 기체의 개발은 곤란했으며, 미국의 Sikorsky Aircraft Corporation이 현재 널리 보급되어 있는 싱글 로터형의 양산 헬리콥터 Sikorsky R-4를 출시한 것은 1942년의 일이었다.
또한, 회전날개 항공기의 제어적인 특징 때문에 본격적인 제어형 회전날개 무인항공기의 등장은 1980년대를 기다려야만 했다. 이와 같이 무인항공기 개발 역사 속에서는 후발이었던 회전날개 무인항공기이지만, 운용 시의 편리성이 우수하기 때문에 급속하게 이용이 확대되어 소형 멀티 로터기를 중심으로 현재는 무인항공기 전체에서 큰 부분을 차지하고 있다.
그림 2에 현재 보급되어 있는 무인항공기의 비행 형태에 따른 분류를 나타냈다. 고정날개와 회전날개의 특징을 겸비한 수직 이착륙(Vertical Take-O ff and Landing: VTOL)형도 포함해, 그림 중의 점선으로 둘러싸인 부분이 회전날개 무인항공기로 분류되며 큰 부분을 차지하고 있는 것을 알 수 있다.
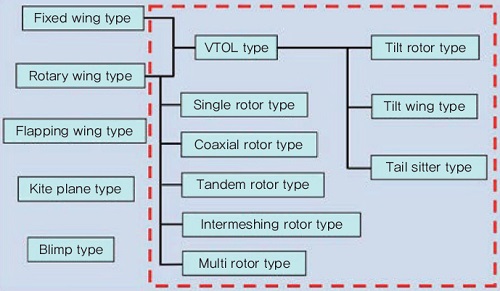
그림 2. 비행 형태에 따른 무인항공기의 분류
2. 회전날개 무인항공기의 특징
헬리콥터를 중심으로 한 회전날개 항공기는 공중 정지나 수직 이착륙이라는 특수한 비행 형태를 가지고 있으며, 고정날개기로는 비행이 불가능한 저공역·저속역에서 비행 특성이 우수한 점과 넓은 이착륙 공간을 확보할 필요가 없다는 특징을 가지고 있다. 이 특징에 의해 회전날개 항공기는 유인항공기 분야에서 1960년대까지 널리 보급되어 있었다. 또한, 60년대, 70년대에는 기체의 소형화, 무선 조종에 의한 무인화도 추진됐는데, 제어형 회전날개 무인항공기가 등장하는 데는 이르지 못했다. 그 이유로는 이하와 같은 회전날개 항공기의 제어적 특징을 들 수 있다.
· 비선형계
· 불안정계
· 열구동계
· 불안정 제로 다이내믹스
이와 같이 회전날개 항공기는 일반적으로 제어가 어렵다고 하는 대상의 특성을 겸비한 매우 제어가 어려운 대상이라고 할 수 있다. 특히 불안정계이기 때문에 고정날개 항공기와 같은 수동 안정성을 갖고 있지 않으며, 항상 제어 입력에 의해 안정화를 도모해야만 한다. 그렇기 때문에 기체의 자세·속도·위치를 정확하게 센서로 측정하는 것과 비교적 빠른 샘플링의 제어 연산이 필요하다.
전자에 대해서는 Global Navigation Satellite System: GNSS가 존재하지 않는 시대에 기체에 탑재한 소형 관성측정장치(Inertial Measurement Unit: IMU)만으로 기체 위치·속도를 정확하게 측정하는 것은 곤란했으며, 후자에 대해서는 당시의 소형 계산기의 연산 능력은 충분히 빠른 샘플링의 제어 연산은 곤란했다고 생각된다.
위와 같은 이유로 제어형 회전날개 무인항공기가 등장하는 데는 주변 기술의 발전을 기다려야만 했다.
회전날개 무인항공기 발전의 역사
여기서는 원격 조종형 헬리콥터를 비롯해 현재의 멀티 로터형 자율 소형 무인항공기에 이르는 회전날개 무인항공기의 발전 역사에 대해 설명한다.
1. 1960~70년대 : 소형화와 원격 조종의 시대
1960년~70년대는 이미 보급되어 있던 유인 헬리콥터의 소형화와 무선 조종에 의한 무인화가 추진된 시대이다. 군사 분야에서는 미국 해군의 프로그램 하에서 Gyrodyne사가 개발한 대잠수함 무인 헬리콥터인 QH50 DASH가 유명하다. DASH는 기체 길이 4m, 로터 직경 6m 정도의 소형 동축 이중 반전 헬리콥터로, 소형 함선에도 탑재할 수 있고 무선 조종에 의한 오퍼레이션이 가능하다는 특징을 가진다. DASH는 1959년에 첫 비행에 성공하고 1962년부터 운용을 시작해 미국 해군에서 1969년까지, 해상 자위대에서는 1979년경까지 운용됐다. 그러나 당시의 기술 수준으로 소형 무인 헬리콥터의 운용은 쉽지 않아, 운용된 DASH의 대부분은 주로 전자 기기의 트러블을 요인으로 없어졌다고 한다.
한편, 같은 시기에 모형 항공기 업계에서도 무선 조종식 소형 헬리콥터의 개발이 활발하게 이루어지고 있었다. 1960년대 후반에 디지털 제어 방식의 조종장치, 이른바 디지털 프로보(프로포셔널 컨트롤 시스템의 약자)가 등장해 정확한 조타를 할 수 있게 되어 개발이 가속됐고, 1970년 6월에 독일의 Dieter Schluter씨가 처음으로 무선 조종에 의한 모형 헬리콥터의 비행에 성공을 거두었다. 그 후 1970년대에는 전 세계의 메이커가 무선 조종 헬리콥터의 개발, 판매를 시작했으며, 일본 국내에서도 히로보를 비롯해 여러 메이커가 무선 조종 헬리콥터 제조·판매에 뛰어들었다.
2. 1980~2000년대 전반 : 싱글 로터형 헬리콥터의 자율화
1980년~2000년대 전반은 1970년대까지 개발된 무선 조종식 소형 헬리콥터를 기반으로 싱글 로터형 헬리콥터의 자율 제어가 활발히 연구·개발된 시대이다. 1980년대, 그 선두를 달린 것이 일본의 농약 살포용 무인 헬리콥터의 개발이다. 1980년 농림수산성이 농림수산항공협회에 조성을 해, 원격 유도식 소형 비행 살포장치(RCASS)의 개발을 시작했다. RCASS는 DASH와 동일한 동축 이중 반전 로터를 채용했으며, 자세 제어와 고도 제어를 갖는 제어형 회전날개 무인항공기로서 개발됐다.
1983년부터는 원동기의 제공을 계기로 야마하발동기도 개발에 참여, 1987년에는 시제작기의 첫 비행에 성공했다. 그러나 동축 이중 반전 로터 기구의 복잡성과 조종 안정성 부족 때문에 RCASS는 실용화에는 이르지 못했다.
한편, 야마하발동기는 RCASS 개발과 병행해, 당시 이미 무선 조종 헬리콥터의 톱 메이커였던 히로보와 공동으로 1985년부터 싱글 로터형 무인 헬리콥터의 개발을 추진, 1988년에는 R-50이라는 명칭으로 이것을 실용화하고 1989년에는 양산화에 성공했다. 이 R-50의 실용화는 90년대 이후 소형 헬리콥터의 자율 제어 연구에 큰 영향을 미치게 된다.
1990년대에 들어서면서 세계의 여러 대학에서 소형 싱글 로터 헬리콥터의 자율 제어 연구가 활발히 이루어졌다. 미국에서는 카네기멜론대학, 남캘리포니아대학, 캘리포니아대학 버클리교, 조지아공과대학, 유럽에서는 린셰핑대학, 베를린공과대학, 스위스연방공과대학, 세비야대학 등에서 선구적인 연구가 이루어졌다. 여기서 주목해야 할 것은 이러한 연구의 대부분이 앞에서 말한 야마하발동기의 R-50과 그 후계 기체인 R-MAX가 플랫폼으로 이용된 것이다. 당시 이미 뛰어난 자세 제어를 실현하고 있던 이들 기체를 이용해 GPS와 비전 센서에 의한 유도, 학습 기반 제어, 여러 기체의 협조 비행 등 첨단적인 연구가 실시됐다.
일본 국내에서도 기업에서는 야마하발동기의 R-MAX, 후지중공의 RPH-2, 카와다공업의 RoboCopter 등의 산업용 무인 헬리콥터가 잇따라 개발되는 동시에, 대학에서는 도쿄공업대학, 교토대학, 와가야마대학, 오사카부립대학 등에서 자율 제어 연구가 실시되고 있었다.
그러한 가운데 필자가 소속돼 있던 지바대학 노나미 연구실에서도 1998년부터 소형 무인 헬리콥터의 자율 제어에 관한 연구를 시작, 2001년에는 히로보의 협력 하에 GPS 환경의 자율 비행에 성공을 거두었다. 이때 자율화에 성공한 소형 싱글 로터 헬리콥터 SF40의 외관을 그림 3에 나타냈다. 이 기체는 동력원으로 2사이클 가솔린 엔진을 탑재하고, 로터 직경은 약 1.8m, 총중량은 14kg 정도였다. 지바대학의 연구 그룹에서는 이 기체를 이용해 2006년경까지 GPS 환경 하의 공중 정지, 궤도 추종 제어, 비전 센서를 이용한 비행 제어, 고속 비행, 오토로테이션 제어, 여러 기체의 편대 비행 등의 연구를 실시했다.

그림 3. 소형 싱글 로터 헬리콥터 : SF40
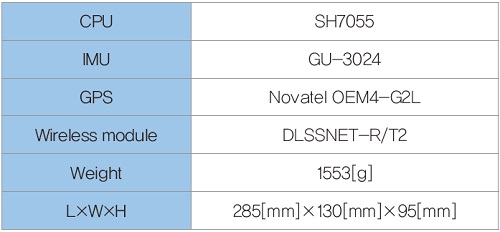
당시의 회전날개 무인항공기는 엔진을 동력으로 하고, 싱글 로터로 총중량 10kg 이상의 기체가 주류이며, 세이코앱손의 마이크로 플라잉 로봇 등의 일부 예외를 제외하고 전동 소형기는 소수파였다. 그 이유로서 당시 제어장치의 중량과 크기를 들 수 있다. 표 1에 SF40의 제어에 이용되고 있던 제어장치의 제원을 나타냈다. 장치 전체의 중량이 1.5kg이나 되고, 그 대부분을 IMU가 차지하고 있었다. 이러한 제어장치를 당시의 전동 소형기에 탑재하는 것은 곤란했기 때문에 엔진기가 주류였다고 생각된다.
표 1. SF40의 제어장치 사양
이상에 나타낸 바와 같이, 2000년대 전반까지 GPS 환경 하에서 싱글 로터형 회전날개 무인항공기의 자율 제어 기술은 이미 확립되어 있었다. 그러나 대형 엔진기를 현장에서 운용하기 위해서는 전문 지식과 엄격한 위험 관리가 필요하며, 농약 살포나 공중 촬영 등의 특정한 업무 이외에 회전날개 무인항공기의 이용이 확대되지는 않았다.
3. 2000년대 후반~2010년대 : 싱글 로터에서 멀티 로터로
2000년대 후반에 들어서면서 기체의 전동화, 소형화, 멀티 로터화라는 패러다임의 변화가 발생했다. 우선 대용량의 리튬 폴리머 배터리와 고성능 DC 브러시리스 모터의 등장으로, 모형 항공기 업계를 중심으로 전동화의 물결이 밀려들고, 이어서 Micro Electro Mechanical Systems : MEMS 기술 발전에 의해 소형, 고성능의 관성 센서가 등장함으로써 기체의 소형화가 진행됐다. 또한, 이들 소형 관성 센서가 게임기·휴대전화·스마트폰에 채용됨으로써 저렴하게 구입할 수 있게 된 동시에, 차재, 스마트폰용으로 내장 CPU가 고성능화됨으로써 단순한 기구이지만 높은 샘플링 레이트의 각속도·자세 제어가 필요한 전동 멀티 로터기가 보급되어 갔다. 전동 멀티 로터기의 원형은 1989년에 키엔스가 취미용으로 발매한 자이로소서까지 거슬러 올라갈 수 있는데, 앞에서 말한 주변 기술이 미성숙했기 때문에 싱글 로터를 대체하는 데는 이르지 못한 역사가 있다.
소형 전동 멀티 로터기의 연구·개발은 당초 유럽이 선도하고 있었다. 2005년에 독일에서 창업한 Microdrones사에서는 2007년까지 자율형 쿼드 로터 헬리콥터인 md4-200을 개발, 공중 촬영용 드론으로 출시했다. 또한, 마찬가지로 독일에서 2007년에 창업한 Ascending Technologies사는 4개 로터의 Hummingbird를 중심으로 독자 개발한 멀티 로터기를 취미용·공중 촬영용·연구 개발용으로 널리 전개했다. 그들 드론의 특징으로서 1kHz라는 매우 빠른 레이트로 제어를 함으로써 매우 높은 제어 성능을 실현하고 있던 점을 들 수 있다. 이 Ascending Technologies사의 고성능 드론이 전 세계의 대학에서 연구에 이용되게 되어, 2010년경까지 제어·로보틱스 분야에서 멀티 로터기의 연구가 확대되어 갔다. 그중에서도 펜실베이니아대학과 스위스연방공과대학의 연구가 대표적이다.
2010년에는 프랑스의 Parrot사에서 AR.drone이 출시되어 드론이라는 말이 단숨에 시민권을 얻었다. AR.drone은 당시 옥외 비행이 주류였던 가운데서 비전 센서와 초음파 센서를 이용한 안정된 실내 비행을 실현했으며, 취미용이라고 해도 매우 고성능의 기체였다고 할 수 있다. 덧붙여서 현재 세계적인 점유율을 가진 드론 메이커인 DJI는 당시 아직 싱글 로터 헬리콥터의 오토파일럿을 판매하고 있을 뿐, 멀티 로터기에는 참여하고 있지 않았다.
그 후 2013년경부터 DJI의 멀티 로터 헬리콥터 Phantom 시리즈의 출시, Amazon에 의한 드론 배송 서비스 Prime Air의 발표 등을 거쳐 서서히 회전날개 무인항공기에 대한 사회적 관심이 높아지고, 취미용뿐만 아니라 측량, 점검, 물류 등 다양한 산업 분야로 이활용이 급속히 확대되어 갔다. 멀티 로터기가 이렇게까지 사회에 침투하게 된 기술적 이유는 싱글 로터기에 비해 압도적으로 구조가 심플하고, 소형화도 쉽기 때문에 메이커, 유저 모두 비교적 참여가 쉬웠다는 점을 들 수 있다. 또한, 오늘날의 선진적인 드론 개발을 크게 밀어준 존재로서 다양한 종류의 오픈소스 프로젝트가 있다.
2007년 DIY Drone의 출시를 시작으로, 인터넷 커뮤니티 상의 드론 개발에 관한 정보 교환이 활발해지고, 거기서부터 태어난 ArduPilot, Pixhawk, MultiWii 등과 같은 오픈소스의 하드웨어 및 소프트웨어 프로젝트에 의해 전 세계 사람들이 드론 개발에 참여할 수 있게 됐다. 이러한 프로젝트 속에서 MavLink나 Follow Me 기능 등 현재 드론의 표준적 기능이 잇따라 개발됐다.
이상과 같이 발전해 사회에 침투하게 된 회전날개 무인항공기이지만, 현재는 전동 멀티 로터기뿐만 아니라 업무에 따라서는 엔진기, 싱글 로터기 등의 이용이 다시 검토되고 있으며, 그 기술도 세분화되고 있다. 회전날개 무인항공기에 관한 최신 기술 동향에 대해서는 이하에서 설명한다.
회전날개 무인항공기의 최신 기술 동향
여기서는 회전날개 무인항공기에 관한 최신 기술 동향에 대해 설명한다. 현재 회전날개 무인항공기의 최신 연구 개발은 주로 구조와 기구, 제어, 내비게이션, 가이던스로 크게 나눌 수 있다.

그림 4. 전구동형 드론
우선, 구조와 기구에 관한 연구로서 전구동형 드론과 환경과의 접촉을 허용하는 드론을 들 수 있다. 원래 열구동계인 회전날개 무인항공기이지만, 멀티 로터기의 로터를 틸트시킴으로써 6축 방향으로 독립된 입력을 가지는 전구동 드론(그림 4)을 실현할 수 있고, 전구동형 드론은 기존의 드론과 비교해 정도 높은 위치 제어가 가능하다는 것을 보여주고 있다. 또한, 드론 자체를 케이지로 둘러싸서 주위 환경에 접촉해도 비행을 계속할 수 있는 드론이 제안되고, 그 발전으로서 종이접기에서 영감을 얻은 케이지마다 접을 수 있는 드론도 제안되고 있다. 이러한 새로운 구조를 갖는 기체는 구조물 점검이나 고소 작업 등의 분야에 대한 회전날개 무인항공기의 응용이 기대되며, 정밀 비행이나 접촉 작업이라는 새로운 비행 형태를 실현하기 위해 등장했다고 할 수 있다.
제어에 관한 연구로서는 첨단 비선형 제어를 이용한 비행 제어에 관한 연구와 물리적인 상호 작용을 고려한 제어, 비주얼 서보를 이용한 제어에 관한 연구를 들 수 있다. 비선형 모델 예측 제어와 고차 슬라이딩 모드 제어를 이용한 제어계는 회전날개 무인항공기에 대해 지금까지 없었던 제어 성능과 뛰어난 로버스트성을 제공할 가능성을 숨기고 있다. 또한, 앞에서 말한 접촉 작업을 목적으로 한 환경과의 물리적 상호 작용을 고려한 제어와 테더로 연결된 드론의 제어는 회전날개 무인항공기의 활용 범위를 넓히게 된다. 또한, 비전 센싱만을 이용한 비행 제어는 생물 비행형 드론의 등장을 시사하고 있다고 할 수 있다.
내비게이션에 관한 연구에서는 Visual SLAM을 중심으로 한 비GPS 환경 하의 자세·위치·속도의 추정 기술이 비약적으로 향상되어 있으며, 가이던스 분야에서는 비전 센서를 이용한 Sense and Avoid 기술과 복수 드론의 편대 비행, 관제에 관한 연구가 중심으로 되어 있다. 이러한 기술에 관해서는 미래 도시 지역의 드론 운용을 내다보고 연구되고 있다.
이상에 나타냈듯이 회전날개 무인항공기의 기술은 현재 더욱 일취월장으로 향상되고 있다는 것을 알 수 있다.
후기
이 글에서는 회전날개 무인항공기 기술의 발전에 대해 설명했다. 현재 주류가 되어 있는 전동 소형 멀티 로터기에 이르기까지 어떠한 기술적 발전과 난관 극복이 있었는지를 회전날개 무인항공기의 개발 역사를 풀어감으로써 상세히 설명하고, 최신 기술 개발 동향에 대해서도 다루었다.
회전날개 무인항공기 기술은 지금도 일취월장으로 향상되고 있으며, 앞으로 기술 진보에 의해 그 이용 범위가 확대되어 진정한 의미에서 드론 사회가 오기를 기대한다.
스즈키 사토시, 지바대학











































