EtherCAT은 다양한 이더넷 프로토콜보다 높은 요구조건의 등시성 전송률 보장, 대역폭 및 간섭 내구성이 우수하지만, CAN과 같은 여타 시스템 버스만큼 보편화되지 못했다.
하지만 앞으로는 EtherCAT의 낮은 구현 비용, 우수한 제품 품질 달성, 장기적인 부품 공급 및 통합 개발환경 제공 등의 장점을 갖춘 XMC4800이 이러한 판도에 변화를 줄 수 있을 것으로 기대된다.
EtherCAT은 어떤 실시간 이더넷 프로토콜보다도 높은 요구조건의 등시성 전송률 보장, 대역폭 및 간섭 내구성을 갖추고 있다. EtherCAT은 지속적으로 진화하면서도, 확장된 IP 코어의 기능을 사용하더라도 언제나 하위 호환성을 유지한다는 장점이 있다. 하지만 이러한 이점에도 불구하고 CAN과 같은 여타 시스템 버스만큼 보편화 되지 못하고 있다.

이러한 상황에서 인피니언의 XMC4800 마이크로컨트롤러는 이러한 판도에 변화를 줄 수 있을 것으로 기대된다. 그 이유는 EtherCAT의 낮은 구현 비용, 우수한 제품 품질 달성, 장기적인 부품 공급(적어도 2027년까지) 및 EtherCAT 시스템 버스를 이용한 어플리케이션과 EtherCAT 응용 프로토콜 개발이 용이하도록 통합 개발환경을 제공하기 때문이다.
디지털화는 제조 분야로까지 확대되고 있으며, 이로 인해 제조 분야에서도 대량의 데이터가 발생하고 있다. 이러한 데이터는 센서 및 엑추에이터로부터의 측정 및 제어 데이터, 로컬 및 원격 진단을 위한 데이터, 머신에서 머신으로 전달되는 데이터 등을 포함한다. 자동화 전문가들에게 머신 차원의 통신에 대해서 물어보면 EtherCAT이 갈수록 자리를 잡아가고 있다고 말한다.
반면, Profibus와 CAN 같은 전통적인 시스템 버스들은 기술적 한계에 다다르고 있다. 이들 표준 시스템버스는 대역폭의 한계로 대량의 데이터를 처리하지 못한다. 또한 앞으로 ‘Industry 4.0’이 어떤 식으로 전개될지는 확실치 않으나 데이터의 양이 줄어들지는 않을 것이라는 점은 확실하다. 이러한데도 실시간 이더넷 시스템은 아직까지 보편적으로 수용되지는 못하고 있다. 드라이브, PLC, I/O 모듈 제조업체들은 여기에 대해서 여러 가지 이유를 가지고 있다. Ethernet/IP(Rockwell 표준)에 대해서는 많은 이들이 일정한 데이터 전송률의 보장성 부족이 한계점이라고 한다. 그럼으로써 고작해야 한 자릿수 마이크로초 대의 사이클 시간이 가능해 보인다.
Siemens 표준인 Profinet 역시 실시간 측면에서 동일한 한계점을 가지고 있다. 또 한편으로 등시성 Profinet IRT는 완전히 성숙하지 못하다는 평가를 받고 있다. 현행 버전인 2.3 버전을 최종적으로 타결하는 데만도 수년이 걸렸으며, 잠정 버전들 사이에 상호 호환이 불가능하고, 2.3 버전이 실제로 최종 버전이 될 것인지도 여전히 두고 보아야 할 일이다.
반면, EtherCAT은 2004년 이후로 변경되지 않았다. 그래서 여전히 초기의 장비들로도 그 동안에 새 기능들을 속속 추가한 새로운 장비들과 같은 네트워크로 통신할 수 있다. 또한 EtherCAT은 세 자릿수에서 두 자릿수 나노초 대에 이르는 우수한 실시간 데이터 전송율을 보장한다. 현재로서 EtherCAT이 Profinet 및 Ethernet/IP와 공통되는 점은 조달 비용과 전체적인 제품 수명에 걸친 유지보수 비용이 비교적 높다는 점뿐이다. 이것은 지금까지는 여기에 사용하도록 통합적인 IC 제품이 나오지 않았기 때문이다.
하지만 인피니언의 XMC4800 32비트 마이크로컨트롤러를 사용하면 변화가 일어날 것으로 기대된다. XMC4800은 ARM의 Cortex®-M4 프로세서를 채택하고 EtherCAT 슬레이브 컨트롤러와 아날로그/혼성신호 IP를 통합한 최초의 마이크로컨트롤러이다.
TI Sitara, FPGA, ASIC을 기반으로 한 기존 솔루션들과 비교한 것을 보면 XMC4800을 사용함으로써 EtherCAT을 얼마나 간편하게 구현할 수 있게 되었는지 알 수 있다. XMC4800은 EtherCAT 슬레이브 컨트롤러를 스타트업하기 위해서 외부 메모리나 오실레이터 같은 추가적 부품을 필요로 하지 않는다.
또한 PLL을 통합함으로써 요구되는 25MHz 클록으로 EtherCAT IP를 제공하며, ARM Cortex M4 프로세서가 통합되어 있는 RAM 또는 플래시 메모리로부터 144MHz로 코드를 실행할 수 있다. 이 외에 BOM을 줄임으로써 시스템 비용을 확실하게 낮춘다. 만약 외부 메모리를 사용하면 처음에는 당장 드러나지 않는 문제점을 내포하게 된다.
다시 말해서 제품 수명 주기가 다하기까지 제품 유지보수가 훨씬 더 까다롭다는 것이다. 이것은 메모리 업체들이 자사 기술을 PC와 모바일 컴퓨팅 용으로 최적화함으로써 길어야 5년쯤 후에는 경제성이 떨어진다는 이유에서 그 제품을 단종시킬 수 있기 때문이다. 이로 인해 산업용 시스템의 부품 단종으로 이어진다. 이렇게 하는 것은 산업용 시스템의 수명 사이클과는 맞지 않는다. 산업용 시스템에서는 장비 수명이 원칙적으로 15년 혹은 그 이상에 이르기 때문이다. XMC4800은 이러한 문제를 해결한다. XMC4000 마이크로컨트롤러 제품군의 모든 제품은 적어도 2027년까지 장기적인 공급을 보장하기 때문이다(그림 1).
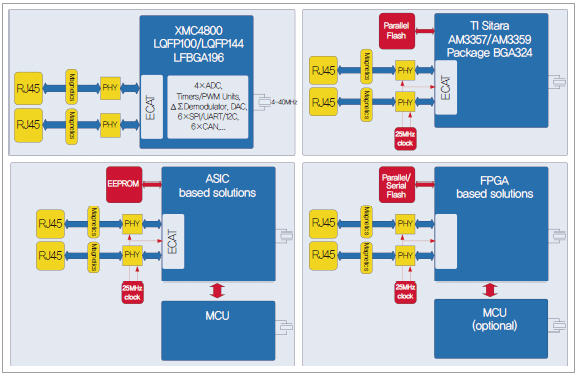
▲ 그림 1. EtherCAT 구현 개요(XMC4800을 사용함으로써 추가적 메모리, 수정 클록 펄스 발생기, 마이크로컨트롤러를
필요로 하지 않고 EtherCAT을 간편하게 구현할 수 있다. 그럼으로써 부품 비용과 PCB 면적을 절약할 수 있다)
EtherCAT에 엑추에이터 및 센서 기능 통합
XMC4800은 EtherCAT 슬레이브 컨트롤러 이외에도, 블록 다이어그램(그림 2)에서 보듯이 애플리케이션을 포괄적으로 지원하기 위한 다수의 주변장치들을 통합하고 있다.
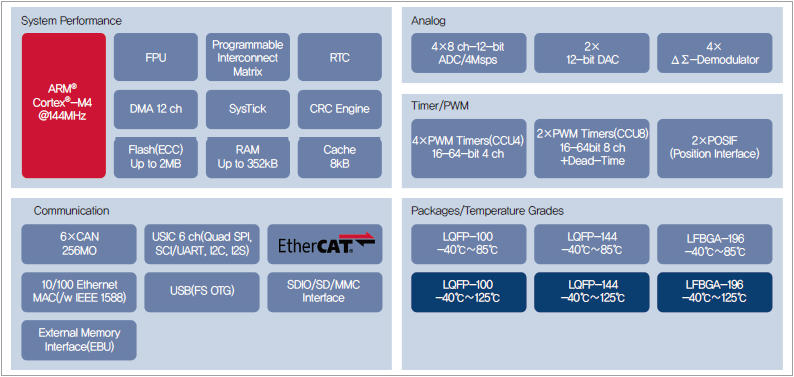
▲ 그림 2. XMC4800은 업계 최초로 표준적 ARM Cortex 마이크로컨트롤러로 EtherCAT 노드와 플래시 메모리 및
아날로그/혼성신호 IP를 통합하였다. 또한 최초로 최대 125℃ 온도 범위와 AEC-Q100 인증을 충족하는 제품이다
위에서 언급했듯이 ARM Cortex®-M4 프로세서, 최대 2MB에 이르는 대용량 플래시 메모리, 최대 352KB에 이르는 RAM에 더해서, XMC4800은 또한 통신, 엑추에이터, 센서 용으로 사용하기 위한 다수의 기능들을 통합하고 있다. Cortex-M IP 기반의 어떤 제품도 CPU 개입 없이 대량의 통신, 256개의 메시지기반의 송수신 FIFO를 갖춘 6개의 CAN 노드를 제공하지 않는다.
더 나아가서는 CPU의 관여 없이 전송 속도가 각기 다른 CAN 네트워크들 사이에 게이트웨이 모드로 교환도 가능하다. XMC4800은 CAN과 EtherCAT으로 이루어진 혼합적인 네트워크에 사용할 수 있도록 매끄러운 솔루션을 제공하므로 DMA 전송을 통해서 CAN에서 EtherCAT으로 게이트웨이를 효율적으로 구축할 수 있다(그림 3).
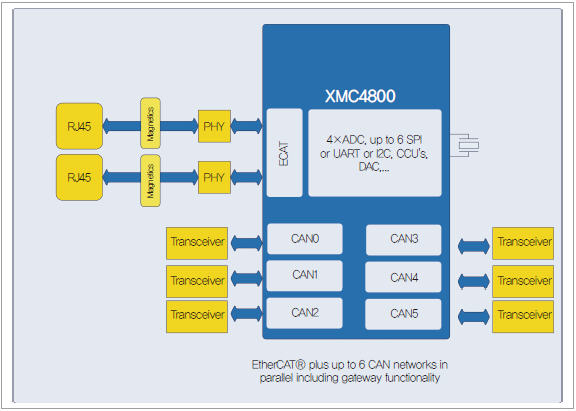
▲ 그림 3. 전용적인 EtherCAT ASIC, 외부적 메모리, 수정 클록 펄스 발생기를 필요로 하지 않고
XMC4800으로 EtherCAT과 CAN을 동시적으로 실행할 수 있으며 게이트웨이 모드도 가능하다
또한 프로그래머블 USIC 인터페이스를 통해서 6가지 직렬 인터페이스가 가능하다(UART, SPI, 듀얼 및 쿼드 SPI, I2C, I2S). 더불어 외부 병렬(EBU), 시리얼(USB) 버스 및 대량 저장 장치 연결용 SDIO/SD/MMC 인터페이스도 제공한다. 표준적 TCP/IP 이더넷 인터페이스는 로컬 및 원격 진단과 유지보수 용으로 사용하기에 편리하다. 이러한 통신 인터페이스들과 함께 XMC4800만의 또 다른 고유의 차별화되는 점은 아날로그 및 혼성신호 IP를 통합하고 있다는 것이다.
센서 용으로는 4개 12비트 A/D 컨버터, 4개 델타-시그마 복조기, 2개 인코더 인터페이스를 포함하고 있다. 엑추에이터 용으로는 2개 풀-브리지를 제어할 수 있는 2개 타이머 유닛, 하프-브리지 용의 4개 타이머 유닛, 2개 12비트 D/A 컨버터를 포함하고 있다. 그럼으로써 EtherCAT 통신을 동시적으로 실행하면서 리졸버나 인코더를 통해서 위치 검출을 포함해 최대 2개의 모터를 제어할 수 있다(그림 4).
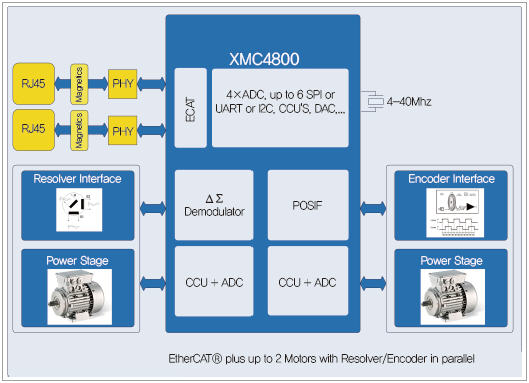
▲ 그림 4. XMC4800을 사용함으로써 위치 검출과 EtherCAT을 포함해서 최대 2개 모터를 제어할 수 있다.
뛰어난 견고성과 품질로 새로운 분야에 사용 가능
EtherCAT 애플리케이션은 주로 공장 자동화에 이용되고 있다. 아직까지 이 기술은 필드버스에 대해서 높은 실시간 성능을 요구하는 여타 분야들로는 사용이 확대되고 있지 않다. 그러한 분야를 예로 들면, 건설 장비, 지게차, 농기구 등을 들 수 있다. 이것은 어쩌면 당연한 것일 수도 있다. 이전의 EtherCAT 부품들은 요구되는 품질과 신뢰성을 충족하지 못했기 때문이다.
신뢰성을 검증하기 위해서는 전통적인 자동차 분야와 마찬가지로 최대 125℃에 이르는 확장 주변 온도 범위로 동작하고 AEC-Q100 인증을 충족해야 할 것이다. XMC4800은 이러한 모든 요구를 충족하는 최초의 EtherCAT 부품이다. 그런데 이들 분야와 자동차 분야는 한 가지 차이점이 있다. XMC4800은 PPAP(Production Part Approval Process)를 하지 않았으므로 승용 자동차 용으로 사용하기 위한 것은 아니다. XMC4800 마이크로컨트롤러 제품군은 다양한 메모리 용량(1MB 플래시 및 200kB RAM에서부터 2MB 플래시 및 352kB RAM에 이르기까지), 패키지(LQFP100, LQFP144, LFBGA196), 온도 범위
(최대 85℃ 및 최대 125℃)로 총 18개 제품으로 구성되었다. 모든 XMC4800 제품은 모든 XMC4000 마이크로컨트롤러와 코드 호환이 가능하며 같은 패키지끼리는 핀 호환이 가능하다.
‘플러그 앤 플레이’, XMC4800을 사용한 EtherCAT 구현
인피니언은 EtherCAT 노드를 신속하게 개발할 수 있도록 개발 보드(XMC4800 Relax EtherCAT Kit)와 소프트웨어 개발 툴을 제공한다. XMC4800 Relax EtherCAT Kit는 LQFP-144 패키지의 XMC4800 마이크로컨트롤러를 탑재하고 온보드 디버거, 표준적 이더넷 인터페이스, CAN 노드 USB, SD/MMC 카드 리더를 포함하고 있다.
이 키트는 인피니언의 공인 유통판매 업체들이나 XMC 키트 웹사이트(www.infineon.com/xmc-dev)에서 구입할 수 있다. 소프트웨어 개발을 위한 라이브러리와 앱을 포함하는 DAVE 개발 환경을 무료로 제공한다.
EtherCAT을 위해서 DAVE는 BECKHOFF의 SSC(Slave Stack Code)를 사용하고 있다. 무료 개발 환경과 함께 다수의 써드파티 업체들로부터 상용 EtherCAT 슬레이브 스택을 사용할 수 있다.
하이루오 키우 _ 인피니언 테크놀로지스