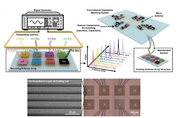
헬로티 이동재 기자 | DGIST 정보통신융합전공 장재은 교수·최지웅 교수팀이 무선전력 및 신호 송수신용 초소형 다중 안테나 시스템을 개발했다고 17일 밝혔다. 여러 개의 마이크로 사이즈의 소형 안테나가 간섭 없이 작동해, 향후 마이크로 로봇 또는 뇌-기계 연결 등 최신 기술 발전에 기여할 것으로 기대된다. 최근 전자기기의 소형화로 무선 연결의 핵심 부품인 안테나 소형화가 중요해지고 있지만, 안테나를 소형화할수록 효율이 떨어지고, RF매칭이 어렵다는 기술적인 한계가 있어 왔다. 게다가 마이크로미터 레벨의 크기에 대한 연구는 거의 이루어지지 못한 상태다. 이에 장 교수팀은 초소형 마이크로사이즈의 안테나 개발과 더불어 초소형 크기특성의 응용성을 극대화하기 위해 다수의 마이크로 안테나가 독립적으로 작동할 수 있는 기술을 개발했다. 또한 형태적으로 다른 플로팅 안테나를 적층형의 이중층으로 형성하는 기술을 개발해 안테나 간 선택성을 획기적으로 증가시켰다. 연구팀의 개발한 마이크로 안테나는 1~7GHz에서 선택적으로 작동하며, 마이크로 사이즈 안테나 중 가장 높은 효율인 1%~7%의 전송효율을 달성했다. 또한, 기존의 복잡하면서 큰 면적을 차지하는 RF매칭회로를 제거해
[첨단 헬로티] 생물처럼 유연한 움직임을 하는 부드러운 기구, 기계를 만드는 것. 이 문제에 대해 옛날부터 많은 기계 메이커, 전기 메이커, 제어 메이커가 매료되어 낭만을 느끼고, 수많은 도전을 다양한 방식으로 지금도 끊임없이 계속하고 있다. 필자도 그 중 한사람이다. 현재 이러한 소프트 로보틱스 영역이 재료과학, 정보과학, 생명과학, 의학 연구원도 끌어들여, 다른 분야가 융합돼 세계의 여러 가지 과학 기술, 학술계에 영향을 미치는 최첨단 분야로 성장해 온 것은 아닐까 하는 큰 흐름을 느낄 수밖에 없게 됐다. 이 글에서는 필자 등이 대응해 온 근세포 중에서도 심근세포에 주목한 바이오 액추에이터 기구의 탄생에서부터, 골격근세포 액추에이터, 곤충 근세포에 의한 바이오 액추에이터, 생명기계 융합 웨트 로보틱스에 대해 소개하고, 이 분야의 위치매김, 앞으로 더욱 발전하기 위해 필수적인 과제, 전개에 대해 다루어 본다. 바이오 액추에이터 탄생 연구의 세계에 입문하게 된 계기는 ‘미세한 기계’, ‘보이지 않는 기계’, ‘마이크로 로봇’에 관심을 가진 것으로부터 시작됐으며, 실제로는 후쿠다 토시오 선생, 아
 [헬로스톡] 2월 4일 주목할 종목: 네패스·기가비스·SNT다이내믹스·CJ CGV
[헬로스톡] 2월 4일 주목할 종목: 네패스·기가비스·SNT다이내믹스·CJ CGV
 캔버스앤피플, 택스캔버스로 세무 전문가 판단 중심 AI 인프라 제시
캔버스앤피플, 택스캔버스로 세무 전문가 판단 중심 AI 인프라 제시
 카스퍼스키, AI 기반 계정 탈취 탐지 강화한 SIEM 공개
카스퍼스키, AI 기반 계정 탈취 탐지 강화한 SIEM 공개
 오케스트로, 남민웅 금융영업본부장 선임... AI·클라우드 금융 사업 가속
오케스트로, 남민웅 금융영업본부장 선임... AI·클라우드 금융 사업 가속
 [2026 대한민국 ESG를 선도한다] 이승용 한컨설팅그룹 대표 겸 i-DEA 컨설팅교육본부장 “ESG·탄소중립은 ‘리포팅’ 아니라 ‘스티어링’…C레벨이 방향키 잡아야”
[2026 대한민국 ESG를 선도한다] 이승용 한컨설팅그룹 대표 겸 i-DEA 컨설팅교육본부장 “ESG·탄소중립은 ‘리포팅’ 아니라 ‘스티어링’…C레벨이 방향키 잡아야”
 [AW 2026 프리뷰 인터뷰] 에이딘로보틱스, '16시간 수작업' 대체하는 연마·피킹 자동화 솔루션부터 휴머노이드 센서까지 선보인다
[AW 2026 프리뷰 인터뷰] 에이딘로보틱스, '16시간 수작업' 대체하는 연마·피킹 자동화 솔루션부터 휴머노이드 센서까지 선보인다






상호명(명칭) : (주)첨단 | 등록번호 : 서울,자00420 | 등록일자 : 2013년05월15일 | 제호 :헬로티(helloT) | 발행인 : 이종춘 | 편집인 : 김진희 |
본점 : 서울시 마포구 양화로 127, 3층, 지점 : 경기도 파주시 심학산로 10, 3층 | 발행일자 : 2012년 4월1일 | 청소년보호책임자 : 김유활 | 대표이사 : 이준원 | 사업자등록번호 : 118-81-03520 | 전화 : 02-3142-4151 | 팩스 : 02-338-3453 | 통신판매번호 : 제 2013-서울마포-1032호
copyright(c) HelloT all right reserved
UPDATE: 2026년 02월 05일 00시 30분





