[헬로티]
탁상 로봇은 그림 1과 같은 직교계의 로봇이다. 전후로 이동하는 테이블에 워크를 실고, 좌우로 이동하는 상부에 설치한 툴에 의해 작업을 한다. 나사체결, 도포(접착제 도포, 실링), 납땜, 기판 분할, 기판 검사, 초음파 용착, 분주 등 설치한 툴에 따라 여러 가지 용도의 작업에 사용된다.
그림 1은 전후 이동의 X 테이블, 좌우 이동하는 Y축, 상하로 이동하는 Z축의 3축 사양이다. Z기구 대신에 상하 회전하는 ZR기구를 실은 4축 사양도 있다.

그림 1. 탁상 로봇 (JR3303)
그림 1은 양쪽에서 지지하는 문형인데, 한쪽만으로 지지하는 외팔보 타입도 있다. 문형은 휨에 대한 우려가 적은 장점이 있지만, 한편 한쪽이 비어 있는 외팔보는 워크의 형상이나 주변 영역의 자유도가 높은 장점이 있다.
자노메미싱공업에서는 1993년부터 현재까지 누계 약 5만대를 제조·판매해 왔다. 최신 JR3000 시리즈는 3세대 째에 해당된다.
로봇 언어를 탑재하고 있지만, 그것을 가급적 겉으로 드러내지 않고 작업 위치를 지정하고, 작업을 선택해 설정하는 것만으로 티칭해 갈 수 있게 되어 있다.
여기서는 탁상 로봇의 특징과 그 응용을 소개하기로 한다.
탁상 로봇의 특징
1. 기구적인 특징
직교계의 로봇이지만, 이른바 직교 로봇과 달리 워크를 테이블에 싣는다. 직교 로봇·스카라 로봇·수직다관절 로봇 등 대부분의 로봇은 그림 2와 같이 어미 거북이 위에 새끼 거북이를 태우는 구조로 되어 있다. 이 구조에서는 가장 아래의 어미 거북이에게 큰 부하가 걸린다. 큰 모터, 강하고 큰 기구가 필요해지며, 가격은 상승하고 세밀한 제어가 어려워진다.
그림 2. 어미 거북이 위에 새끼 거북이를 태운다
이것에 대해 탁상 로봇은 가장 아래의 어미 거북이는 분리되어 있고, 거기에 워크를 싣는 구조로 되어 있다. 이 1축만이 분리되어 있는 것이 큰 장점이다. 모터는 작아도 되며, 기구는 가볍고 간단해져 세밀한 제어를 하기 쉽다.
한편, 워크를 테이블에 실어 움직이는 제약이 부과된다. 크고 무거운 워크에는 적합하지 않고, 라인에 들어가는 것도 어렵다.
자노메미싱공업의 탁상 로봇은 X축 및 Y축은 벨트풀리 기구, Z축은 볼나사 타입과 벨트풀리 타입의 2종류가 있다.
2. 구동원과 구동 성능
타사 제품도 포함해 대부분의 탁상 로봇은 스테핑 모터를 구동원으로 하고 있다. AC 서보 모터와 볼나사의 구성인 탁상 로봇도 있지만, 가격 상승에 비해 효과가 한정적이다.
스테핑 모터는 부하가 너무 크면 ‘탈조’ 등의 현상이 발생하고, 위치가 틀어져 버린다. 모터에 붙인 낮은 분해능의 엔코더에 의해 탈조를 검지할 수 있는 모델도 있지만, 우선은 부하를 한정해 사용하는 것이 기본이다.
표 1. 구동 성능 표 (JR3303)

표 1에 최신 모델인 JR3000 시리즈의 성능 표를 나타냈다. 워크 질량, 툴 질량은 앞에서 말한 성능 표에 나타낸 대로인데, 이것은 어디까지나 탈조하지 않고 모터 구동이 가능한 한계이며, 정밀한 궤적 제어가 가능하다든지 진동이 충분히 작다든지 하는 것까지 보증하는 것은 아니다.
탁상 로봇은 그 이름대로 보통의 책상 위에 고정하지 않고 사용할 수 있다. 그러나 워크 질량 혹은 툴 질량이 크고, 정밀도가 요구되는 경우에는 본체의 고정이나 본체를 설치하는 거치대의 강성에 대해서도 충분히 주의할 필요가 있다.
3. 범용성과 간단함
자노메미싱공업의 탁상 로봇은 발매 당초 실질적으로는 ‘나사체결 전용기’로, 로봇이라고 부르기는 했지만 범용성은 전혀 없었다.
한편 나사를 죄는 위치를 지정하고, 나사체결의 조건 파라미터, 기본적으로는 ‘나사 길이’, ‘나사 피치’, ‘나사체결 드라이버 회전수’의 3가지를 설정하는 것만으로 나사체결 작업을 시킬 수 있었다. 이 간단함이 사용자로부터 높은 평가를 받았다. 도포 사양, 납땜 사양 등을 전개해 가는 가운데, 이 전용기적인 티칭 방식을 계속 사용하고 있었다.
그 후 당초에 없었던 로봇 언어를 탑재해 범용성을 높였다. 이름 그대로의 로봇이 됐다. 그러나 겉으로는 ‘전용기’로 보이는 간단함을 잃지 않도록 노력하고 있다.

그림 3. PC 티칭 소프트웨어 메인 화면
그림 3은 JR3000 시리즈 PC 소프트웨어(JR C-Points Ⅱ)의 메인 화면이다. 작업하는 위치 좌표(X, Y, Z)를 지정하고, 거기서 무엇을 할지 ‘종별’을 선택해 설정한다. PC 소프트웨어에서는 ‘종별’이 아이콘으로 배열되어 있으므로 이것을 클릭하면 된다. 그림 3은 도포 사양인데, 도포 작업의 아이콘으로 ‘점 도포’, ‘선 도포 시작점’, ‘선 도포 통과점’, ‘선 도포 종료점’ 등이 준비되어 있다. 종별을 선택해 설정하는 것만으로, 도포장치에 대한 ON/OFF 제어를 비롯해 동작을 하게 된다.
탁상 로봇의 이용
1990년대 셀 생산 방식이 유행하기 시작했다. 모델 체인지에 신속하게 대응할 수 있고, 세팅 전환이 용이한 다품종 소량 생산에 최적인 방식이라는 개념이다. 그래서 사용되는 로봇의 하나로서 소형·콤팩트한 ‘탁상 로봇’이 개발됐다. 당초 탁상 로봇은 스탠드얼론(단독)으로 이용됐다.
최근에는 탁상 로봇을 작업 모듈의 중심에 두고, 이것을 연결해 라인을 구성하는 사용법도 있다. 다이내믹 셀 생산 방식에도 기여해 간다.
1. 나사체결에서 손목을 상하지 않게 한다
유럽에서는 사람이 나사체결 드라이버를 사용해 작업하는 것을 대체하기 위해 사용되는 경우가 있었다. 대체라고 해도 사람이 필요하지 않은 것은 아니다. 워크를 로봇에 세트해 나사체결 작업을 시작시키고, 완료된 워크를 꺼내는 작업은 사람이 하고 있었다. 나사를 죄는 부분만 대체하는 것으로, 목적은 인력절감화가 아니었다.
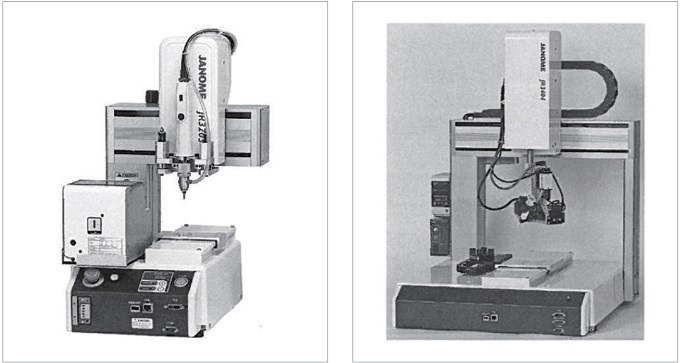
그림 4. 나사체결 사양 그림 5. 카메라, 높이 센서, 니들 어저스터 포함
M3 정도의 나사라도 나사가 죄일 때의 충격을 팔로 받게 되므로 오랜 시간 작업을 계속하는 가운데 작업자가 손목을 상하게 되는 일종의 직업병을 발생시키고 있었다. 이것을 방지할 목적으로 탁상 로봇을 도입하는 케이스이다. 이것은 인권의식이 강한 유럽만의 특색이라고도 할 수 있는데, 로봇을 사용하는 목적의 하나로 고려할 가치가 있다고 생각한다.
2. 정밀 도포
탁상 로봇이 가장 많이 이용되고 있는 것은 정밀 도포 용도이다. 소형기기, 예를 들면 스마트폰이나 그 이어폰 등의 도포(접착제 도포 등)에 사용된다.
정밀한 작업을 하기 위해 워크의 위치결정이 중요하다. 지그의 고안만으로는 필요한 편차를 억제할 수 없는 경우가 있다. 카메라에 의한 워크 위치 검출과 보정 기능을 갖추고 있는 기종을 제공하고 있다. 탁상 로봇은 반복 위치 정확도 ±7μm를 강조하고 있는데, 이것은 어디까지나 상대적인 반복 정확도이고, 절대적인 위치의 정확도가 높은 것은 아니다.
그림 5에 ‘카메라 탑재 도포 사양’을 나타냈다. 이 사양은 표준으로 ‘카메라’, ‘렌즈’, ‘조명’, ‘화상처리장치’, ‘비접촉식 레이저 높이 센서’, ‘니들 어저스터’가 한 세트로 같이 출하된다.
X 테이블에 놓인 워크 상의 ‘마크’를 카메라가 촬영, 미리 등록해 둔 기준 위치와의 차이를 검출한다. 이것에 의해 XY 방향의 위치 보정을 한다.
워크에 선 모양으로 도포하기 전에 도포하는 궤적을 비접촉식 높이 센서로 추적해 높이를 추출해 두고, 이것에 따라 높이를 조정하면서 선 모양 도포를 한다.
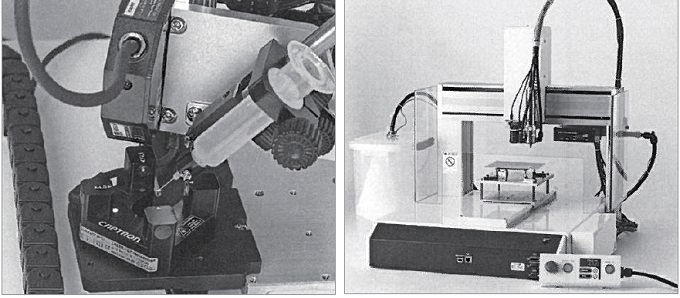
그림 6. 니들 어저스터 (4축) 그림 7. 기판 분할 (전경)
니들 어저스터의 검지부를 그림 6에 나타냈다. 이것은 4축 사양, 즉 회전축을 가진 탁상 로봇에 대응한 것으로, X방향, Y방향으로 레이저의 발광·수광부를 설정하고 니들 끝이 이 레이저광을 차단하는 위치를 검출할 수 있도록 하고 있다.
도포하는 바늘 끝을 니들이라고 부르는데, 이것은 소모품으로 필요에 따라 교환한다. 니들만이 아니라 도포 용기도 함께 교환하는 경우도 있다. 어쨌든 이러한 교환에 의해 바늘 끝의 위치가 약간이라도 틀어지게 된다. 교환을 한 후 니들 어저스터에 의해 니들 끝의 위치를 검출하고, 이것을 TCP(Tool Center Point), 즉 툴 끝의 장착 위치 정보로서 로봇에 설정한다. 이것에 의해 교환으로 인한 위치 변화를 흡수한다.
카메라나 센서에 의해 위치의 보정·조정을 해 정밀도를 높이려고 하는 것인데, 결과적으로 정밀도는 어느 정도일까. 당연히 워크나 여러 가지 조건에 따라 다르지만, 이상적인 상황에서도 양산적으로 편차 ±30μm 이하로 하는 것은 쉽지 않다.
3. 기판 분할
프린트 기판을 분할하는 작업이 있다. 1장의 큰 기판 상에 복수의 기판을 작성, 이것을 뒤에서 분할해 사용한다. 간단한 것으로는 ‘손으로 꺾는 방법’이 있는데, 손으로 꺾는 방법으로 인한 스트레스가 문제가 되는 경우, 회전하는 절단날, 루터에 의한 절삭 분할 등의 방식이 사용된다.
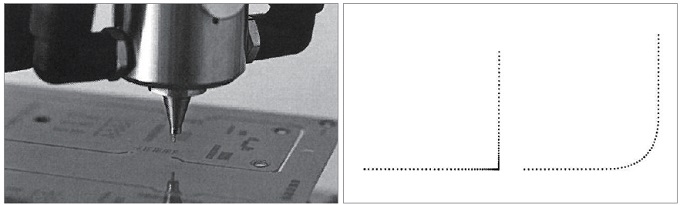
그림 8. 기판 분할 (기판 접사) 그림 9. CP 정지 통과점과 CP 연속 통과점
자노메미싱공업에서는 루터, 루터용 모터 회전 제어기기, 집진 박스를 한 세트로 ‘기판 분할 사양’을 제공하고 있다. 그림 7에 전경을 나타냈다. 또한, 기판을 접사한 것을 그림 8에 나타냈다.
기판 분할은 선 모양의 도포와 동일한 이른바 CP 구동 제어(Continuous Pass)로 직선과 원호의 조합으로 구동시킨다. ‘모서리’ 부위의 경우, 도포에서는 속도의 정상성이 중시되는 한편, 기판 분할에서는 절삭하는 루터가 이용하는 기판 측에 들어가지 않는 것이 중요하다.
자노메미싱공업의 로봇에서는 기본적인 구동 종별로서
· CP 정지 통과점
· CP 연속 통과점
의 2가지를 준비하고 있다. 기판 분할 사양에서는 ‘CP 정지 통과점’을 이용한다. 이 점에서는 일단 이동 속도가 제로가 된다. 한편 선 모양 도포에서 사용되는 ‘CP 연속 통과점’은 속도를 가급적 떨어트리지 않도록, 또한 진동이 적어지도록 제어를 한다.
그림 9에 이 2가지 점을 ‘모서리’로서 90도 방향 변경했을 때의 궤적 모습을 일정 시간마다의 점으로 표현했다.
왼쪽의 CP 정지 통과점에서는 ‘모서리’를 향해 감속해 일단 정지하는데, CP 연속 통과점에서는 선속도를 80% 정도로 유지한 채로, 대신에 조금 안쪽으로 둥그렇게 굽은 궤적을 그린다. 용도에 따라 이것을 구분 사용한다. 기판 절단으로 발생한 분진은 집진 박스에 모은다. 기판의 위쪽, 루터의 옆에서 분진을 빨아들이는 ‘상부 흡입’과 기판의 아래에서 흡입하는 ‘하부 흡입’의 양쪽을 준비하고 있다.
기판 관련으로는 이외에 납땜(인두 납땜, 레이저 납땜), 기판 검사 등의 용도에도 사용되고 있다.
4. 라인에 투입되는 탁상 로봇
보통 탁상 로봇은 스탠드얼론(단독)으로 이용된다. 그러나 탁상 로봇을 라인에 넣어 사용하는 사례도 있다. 예를 들면 스마트폰의 음향 부품이나 기판 제조 공정이다.
완전한 전용 장치로서 만들기에는 변화가 심하고, 직교 로봇이나 수직다관절 로봇으로는 정밀도를 확보할 수 없는 작업이 있다. 이러한 이유로 작업에 대해서는 고정도, 정밀 등의 특징을 살려 탁상 로봇으로 하고, 워크를 자동 반송한다.
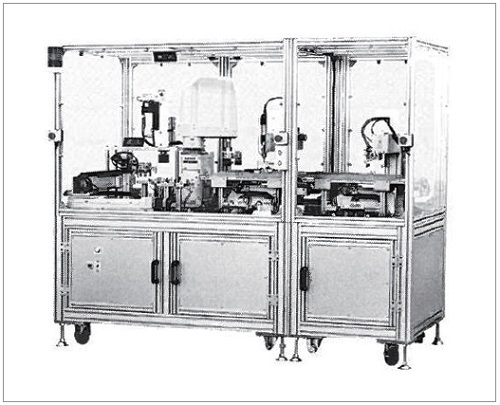
그림 10. 5개 장치의 연결 데모
그림 10은 동사에서 전시회의 시연용으로 제작한 것으로, 왼쪽에서부터 ‘직교 로봇, 전동 프레스, 스카라 로봇, 탁상 나사체결, 탁상 도포’ 등의 5가지 장치를 연결해 동작하는 데모이다. 작업을 할 때에는 X 테이블에 워크가 실리고, 다음 공정으로 보낼 때에는 X 테이블에서 떼어내는 여분의 기구를 준비할 필요가 있지만, 그래도 탁상 로봇을 사용하고 싶다고 하는 수요가 있다.
트렌드
1. 협동 로봇
최근의 트렌드로서 사람과 펜스로 구분하지 않고 가동시키는 협동 로봇이 있다. 최종적으로는 운용을 포함한 위험도 평가에 의해 안전성을 확보할 필요가 있는데, 협동 로봇의 기준도 설정하고 있다.
탁상 로봇은 반드시 협동 로봇의 기준을 만족시키고 있지는 않지만, 원래 80W 이하의 스테핑 모터를 사용하기도 해서 (최신 모델은 80W를 넘는다) 로봇으로는 간주하지 않으며, 사람에 의해 워크를 설치하고 떼어내고 하고 있었다.
모터의 힘이 약해도 위험도 평가는 필요하다. 기판 분할과 같이 절단톱을 사용하는 것이라면, 그 부분의 안전을 확보하기 위해 가드 등이 필요하다. 그렇다고 해도 원래 탁상 로봇은 작업 중 암에 잘 부딪치지 않는 구조를 하고 있다.
2. IoT, 연결되는 탁상 로봇
로봇을 도입하는 목적으로서 기록을 함으로써 ‘부주의로 인한 실수’를 방지한 증명으로 삼는 경우가 있다.
워크에 대해 ‘확실하게 4개의 나사를 죄었다’고 기록을 남긴다. 나사체결의 토크 커브를 기록해 두는 것도 가능하다.
스탠드얼론(단독)으로 사용되며, 반자동화로 워크의 준비나 탈착을 사람이 하는 것이라도 IoT로 연결해 결과를 기록해 두면 충분한 효과를 얻을 수도 있다.
현 시점에서는 운전 기록이나 에러 이력을 축적해 두거나, LAN으로 불러내거나 하는 기능을 가지고 있지만, 아직 작업 결과를 기록하는 공통의 구조를 준비하고 있는 것은 아니다. 앞으로의 과제라고 생각한다.
맺음말
탁상 로봇은 나노오더의 초정밀 가공을 하는 공작기계와는 다르다. 한편 산업용 로봇의 대표격인 수직다관절 로봇과 비교하면 저렴한 것에 비해서는 정밀한 궤적 제어를 할 수 있다. 자동화 중에서도 전자동보다는 반자동에 적합하다.
최근 버 제거 작업에 탁상 로봇을 사용하는 검토를 시작하고 있다. 큰 워크나 힘이 필요한 것에는 적합하지 않지만, 작고 힘이 필요하지 않는 것이라면 이용할 수 있을 것 같다. 버 제거에 대해 잘 아시는 분들에게 협력을 받고 있다. 그 티칭이 간단하므로 로봇 도입의 입문기로서 여러 가지 용도에 이용하면 좋을 것 같다.
히루마 켄이치로, 자노메미싱공업 산업기기영업본부 선임연구원
Copyright ⓒ 첨단 & Hellot.net