산업용 로봇에서 적용된 적이 없는 매우 도전적인 기술적 요구조건으로, 업계에서는 로봇과 인간 사이의 접촉이 일어날 경우 로봇이 인간에게 가하는 힘을 임계값 이하로 제한하는 작업모드를 충족하는 로봇을 실질적인 협동로봇으로 인식하고 있다.
인간-로봇 충돌 시 협동로봇이 준수해야 하는 임계값은 ISO TS 15066의 부속서에 제시되어 있다. 그러나 이 임계값은 강제성을 갖는 규범적 규정이 아닌 단순 참고 또는 권고의 의미가 있는 정보적 규정으로 제시되고 있다는 점이다. 즉, 별도의 추가적인 ISO TS 15066의 개정이 이루어지기 전까지는 이 기준을 준수하려는 노력이 필요하다.

최근 산업용 로봇 기술의 성숙에 힘입어 인간과 같은 공간에서의 작업을 통해 생산성을 극대화할 수 있는 협동로봇(collaborative robot)이 시장에 소개되면서 산업용 로봇 시장에 큰 변화의 물결이 일고 있다.
협동로봇의 등장은 유럽과 일본의 주요 산업용 로봇 제조사들에 의해 구축됐던 산업용 로봇 시장 질서에 큰 지각변동을 일으키고 있고, 여러 산업현장에서 앞다투어 협동로봇을 적용하려는 움직임이 다양한 형태로 보고되고 있다.
작업자와 로봇의 작업공간을 엄격하게 구분하던 기존의 산업용 로봇과 달리 작업자와 작업공간을 공유하는 협동로봇은 필연적으로 높은 안전사고 가능성을 내포하고 있다. 협동로봇에 의한 안전사고의 가능성은 작업자 안전에 대한 기술적이고 실질적인 조치뿐만 아니라 산업안전관련 법령, 보험 등 여러 사회적 제도의 확립도 요구하고 있다.
이에 대응하여 최근 협동로봇과 협동로봇을 이용한 협동작업(collaborative operation)에 대한 안전요구조건을 규정한 국제표준 ISO TS 15066이 제정되었고, 국내의 산업안전보건법도 개정된 바 있다. 이 글에서는 산업현장에 큰 파급효과와 변화를 불러오고 있는 협동로봇의 개념과 의미, 관련 국제표준을 소개한다.
협동로봇 안전규정
기존의 산업용 로봇은 공장자동화에 많은 기여를 하였으나 산업용 로봇이 갖는 위험성을 고려하여 작업자와 로봇이 격리된 환경에서 사용하도록 제약되었다. 이는 본질적으로 인간의 개입이 필요한 많은 로봇자동화 작업의 구현에 제약을 가하여 왔고, 작업 공간 활용에서도 비효율적인 문제를 야기하였다.
이러한 문제를 해결하기 위한 좋은 대안으로 제시된 것이 협동로봇으로, 작업공간을 인간과 공유하게 함으로써 로봇이 가진 장점(뛰어난 반복 정밀도, 힘, 지구력)과 사람이 가지고 있는 우수한 능력(인지/판단 능력을 이용한 비정형화된 작업 수행 능력)을 결합하여 생산성을 향상시키고 작업 공간의 활용 효율을 극대화할 수 있는 장점이 있다.
그러나 작업 공간의 공유는 필연적으로 로봇과 인간 사이의 접촉이나 충돌에 의한 안전문제를 유발하게 되어 협동로봇 및 협동로봇을 이용한 협동 작업에 대한 엄격한 안전규정이 필요하게 되었다.
협동로봇에 대한 안전규정은 2011년에 개정된 산업용 로봇의 안전규정인 ISO 10218-1, 2에 최초로 제시되었으나, 기초적이고 개괄적인 안전 요구조건만을 포함하고 있어 다양한 협동로봇의 실질적 운용에 적용하기에는 부족한 부분이 많았다.
국제표준기구 ISO에서 산업용 로봇 안전표준을 다루는 TC 184 SC 2 (현재는 ISO TC 299로 변경) WG 3에서는 이러한 수요를 고려하여 협동로봇의 안전 요구조건을 보다 상세히 규정한 국제표준 문서 개발을 2011년부터 착수하여 최초의 협동로봇 안전 요구조건 국제표준인 ISO TS 15066 : Robots and robotic devices-Collaborative robots를 2016년 2월 제정하여 공표하였다.
ISO TS 15066 (또는 ISO 10218-1)에서는 협동 작업을 그림 1과 같이 네 가지 모드로 구분하고 있으며, 이중 한 가지 이상의 작업 모드 수행이 가능한 로봇을 협동로봇으로 정의하고 있다. 네 가지 모드는 각각 다음과 같다.
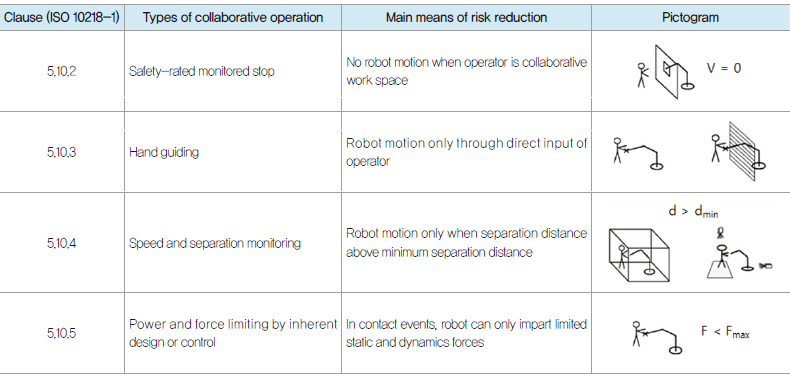
▲ 그림 1. 네 가지 협동작업 모드 (ISO TS 15066 및 ISO 10218-1)
(1) 협동 작업 공간 내에 작업자가 있을 경우, 로봇의 움직임이 금지되는 safety-rated monitored stop 모드
(2) 작업자가 직접 로봇을 잡고 원하는 운동을 구현(교시)하는 Hand guiding 모드
(3) 로봇과 사람 사이의 간격이 최소 이격거리 이상일 경우에만 로봇의 움직임이 허용되는 Speed and separation monitoring 모드
(4) 로봇과 인간 사이의 접촉이 일어날 경우 로봇이 인간에게 가하는 힘을 임계값 이하로 제한하는 Power and force limiting by inherent design or control 모드.
협동로봇이 준수해야 하는 임계값
이러한 네 가지 작업 모드는 협동 작업에서 작업자의 안전을 보장하기 위한 작업 방식으로 처음 세 가지 모드는 기존의 로봇 기술로도 일정 수준에서 구현이 가능하다. 그러나 네 번째 작업 모드는 인간에게 가해지는 접촉 힘이나 압력 같은 생체역학적 물리량을 상해 발생이 일어나지 않는 수준 이하로 유지하도록 엄격히 제한하여 실제 운용 시 인간-로봇 접촉 시에도 작업자의 안전을 담보하는 작업방식이다.
이 작업 모드는 기존의 산업용 로봇에서 적용된 적이 없는 매우 도전적인 기술적 요구조건으로 산업용 로봇 제조사에 매우 큰 기술장벽으로 작용하고 있고, 업계에서는 네 번째 작업 모드를 충족하는 로봇을 실질적인 협동로봇으로 인식하고 있다.
네 번째 Power and force limiting by inherent design or control 모드에서 상해 발생이 방지되는 접촉 힘이나 압력, 즉 인간-로봇 충돌 시 협동로봇이 준수해야 하는 임계값은 ISO TS 15066의 부속서에 제시되어 있다[표 1].
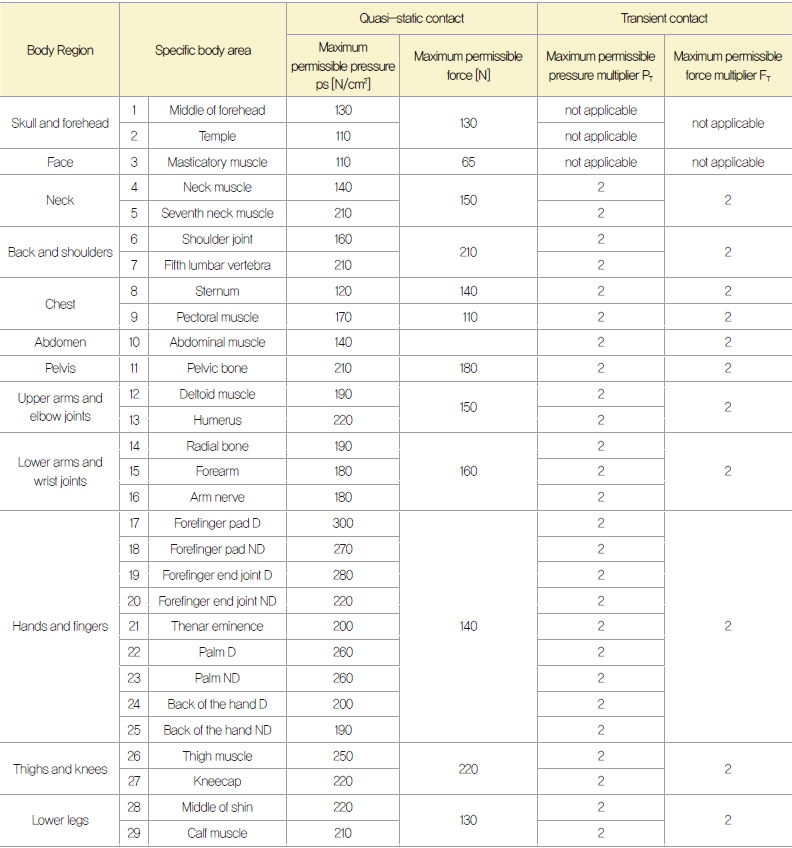
▲ 표 1. 접촉에 의한 통증 임계 데이터(ISO TS 15066 부속서 A)
이 물리량 표는 독일 마인츠(Mainz) 대학의 연구결과를 반영한 것으로, 29개의 대표 신체 부위에 특정 형상을 갖는 프로브(probe)를 이용하여 느린 속도로 압박을 가하여 통증이 시작되는 힘과 압력값을 ‘유사-정적 조건에 대한 생체역학적 한계값’으로 기록한 것이다.
안전요구조건을 규정하고 있는 ISO TS 15066에 상해 발생 임계값이 아닌 통증 발생 임계값을 적용한 이유는 경증상해를 발행시키는 물리적 임계값에 대한 데이터가 존재하지 않으며, 연구윤리규정으로 인해 이러한 데이터를 실증적으로 확보하기 어려운 현실적 한계를 고려하여 상해보다 보수적인 통증에 대한 임계값을 안전기준으로 적용한 것이다.
이러한 통증 임계값은 매우 느린 속도의 접촉 상황인 유사-정적 조건에 대해 얻어진 데이터로 실제로 훨씬 빠른 속도로 발생하는 인간-로봇 접촉에 적용되기에는 한계가 있다. 이를 고려하여 ISO TC 184 SC 2 WG 3의 전문가 그룹에서는 짧은 시간 동안 발생하는 동적인 접촉상황을 과도적 접촉(transient contact)으로 정의하고, 과도적 접촉 상황에 대한 통증 발생 임계값을 여러 생체역학적 연구자료를 근거로 유사-정적 조건의 2배로 설정하여 제시하였다. 다만 과도적 접촉에 대한 임계값은 실험적으로 검증된 것은 아니라는 한계가 있다.
표 1에 제시된 임계값과 관련하여 유의할 점은 이 표가 실린 ISO TS 15066의 부속서가 강제성을 갖는 규범적 규정이 아닌 단순 참고 또는 권고의 의미가 있는 정보적(informative) 규정으로 제시되고 있다는 점이다.
실제로 유사-정적 통증 힘/압력 임계값은 마인츠(Mainz) 대학 한 곳의 실험결과에 전적으로 의존하고 있고 아직 다른 기관에 의해 검증이 되지 않았으며, 과도적 접촉에 대한 임계값은 실험적으로 확인된 바 없다.
그러나 비록 이러한 임계값들이 정보적(informative) 규정으로 제시되고 있더라도 협동 작업에서 작업자의 안전을 담보할 수 있는 별도의 기준이 없는 현재 상황에서는 실질적인 규범적 규정으로 작용한다는 점을 명확히 할 필요가 있다. 즉, 별도의 추가적인 ISO TS 15066의 개정이 이루어지기 전까지는 이 기준을 준수하려는 노력이 필요하며, 실제로 협동로봇 시장에서는 이미 이 기준을 충족하는 로봇들이 출시되어 시장을 확대하고 있다는 점을 주지할 필요가 있다.
앞으로 과제
협동로봇은 인간과 로봇을 동일한 공간 내에서 작업할 수 있게 함으로써 비정형화된 작업조건에 대해서도 인간과의 협동을 통해 로봇의 능력을 극대화하여 활용할 수 있게 하고, 작업공간을 효율적으로 사용할 수 있게 하여 생산성을 향상시키는 장점이 있다. 이로 인해 협동로봇은 산업용 로봇 시장의 판도 및 산업용 로봇을 이용한 공장 구성을 새롭게 바꾸어가고 있다.
ISO TS 15066은 협동로봇의 인간과의 작업 공간 공유에 따른 필연적 위험성에 대응하기 위한 안전 요구조건을 규정하고 있고, 특히 접촉에 의한 통증 임계값을 명시적으로 제시하고 있다. 이러한 규정의 개발은 이미 오랜 기간 관련기술을 축적해온 해외 로봇 선도기업에 의해 주도되었고, 국내의 로봇 산업은 이에 대한 대응이 매우 미진한 상황이다.
ISO TS 15066을 비롯한 협동 로봇 대응기술의 확보 여부는 산업용 로봇 시장의 새로운 프레임이 형성되는 이 시기에 미래 로봇 시장에서의 국내 로봇 산업 기반의 존망을 결정지을 수 있는 중요한 요인임이 분명하다.
아직은 초기 전개 단계에 있는 협동로봇 관련 기술에 대한 적극적 대응을 통해 고착되었던 기존 산업용 로봇 시장의 구도를 깨고 새롭게 재편되고 있는 산업용 로봇 시장에 능동적으로 참여할 수 있는 계기를 마련하는 것이 시급하다고 하겠다.
곽관웅 세종대학교 고수
Copyright ⓒ 첨단 & Hellot.net