촉각 센서 … 스마트폰 터치스크린에서 휴머노이드 로봇까지
인간과 기계가 상호작용할 때 소통의 정확성을 높이기 위해서는 다양한 감각이 필요하다. 그 중 촉각 센서는, 최근 나노재료 기술 및 플렉시블 전자소자가 발전함에 따라 인간 피부에 가까운 성능을 가진 것이 개발되고 있다. 여기서는 로봇과 메카트로닉스, 의료, 휴먼 인터페이스 분야 등에서 활발히 응용되고 있는 촉각 센서의 기술 현황 및 전망에 대해 살펴본다.
김민석 한국표준과학연구원
촉각 센서가 필요한 이유
스마트폰 및 스마트패드가 대중화되면서 ‘터치’는 우리 생활에서 빼놓을 수 없는 일상이 되었다. 우리는 매일 디스플레이 패널을 ‘터치’하면서 스마트폰이라는 기계와 소통하고 있다. 스마트폰이 대중화에 성공한 요인으로는 다양한 요소를 들 수 있으나, ‘터치’에 기반을 둔 사용자 인터페이스와 사용자 경험을 소비자에게 새롭게 제공했다는 점이 요인 중 하나라는 것은 부정할 수 없는 사실이다.
스마트폰이라는 기계가 미래에는 어떻게 진화할지 생각해 보면, 결국 우리가 꿈꾸는 휴머노이드 로봇이라는 것을 쉽게 유추할 수 있다. 일부 기능은 이미 스마트폰에서 구현되고 있다. 음성인식은 그 좋은 예이다. 미래의 로봇은 이 음성인식 기능을 바탕으로 우리가 하는 단순한 명령뿐만 아니라 인간의 감정과 의도까지 알아차릴 수 있을 것이다.
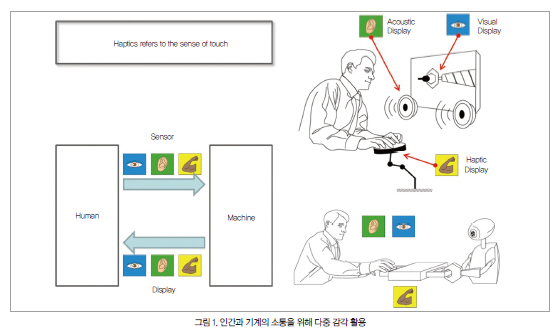
로봇이 우리의 일상생활에 얼마나 관여할 수 있는가 하는 것은 결국 ‘소통(Communication)’에 달렸다고 볼 수 있다. 사람은 서로 소통하기 위해 여러 개(주로 시각, 청각, 촉각)의 감각을 동원한다. 감각을 더 많이 사용할수록 소통의 정확도가 더 높아지기 때문이다. 마찬가지로 인간과 기계도 이 감각을 모두 이용할 때 더 정확하게 소통할 수 있다.
그림 1은 인간과 기계가 상호작용할 때 사용하는 감각에 대해 나타낸 것으로, 기계는 시청촉각 ‘센서’를 이용하여 인간으로부터 정보를 받고 인간은 시청촉각 ‘디스플레이’를 통해 기계로부터 정보를 받는다. 즉, 센서는 기계에게 시청촉각을 전해주는 장치이고 디스플레이는 기계가 인간에게 시청촉각을 통해 표현하는 장치라고 할 수 있다.
흔히 디스플레이라고 하면 시각 디스플레이로 생각하기 쉬운데, 청각 디스플레이와 촉각 디스플레이도 디스플레이의 일종이라고 할 수 있다. 이와 같은 시청촉각 ‘센서’와 ‘디스플레이’는 사용자와 소통하기 위해 이미 스마트폰에 장착되어 사용되고 있다.
최신 스마트폰 사양에서 살펴보면 시각, 청각, 촉각 센서로서 각각 CMOS 이미지 센서, MEMS 마이크로폰, 정전용량 터치스크린이 장착되어 있고 시각, 청각, 촉각 디스플레이로서 LCD 패널(또는 AMOLED 패널), 스피커, 진동자가 사용되고 있다.
또한 시청촉각 센서는 인지시스템과 결합하여 다양한 사용자 경험을 제공하고 있다. 예를 들면 시각센서와 얼굴인식이 결합된 ‘얼굴로 잠금 해제(Face Unlock)’ 기능, 청각센서와 음성인식이 결합된 음성 명령(Siri, S-voice 등) 기능을 제공하고 있으며, 멀티 터치 센서를 이용하여 다양한 제스처 인식 기능을 구현함으로써 사용자와 스마트폰과의 소통 기능을 강화하고 있다.
이와 같이 여러 가지의 감각을 이용하여 주변과 상호작용하는 것이 중요한데, 촉각은 시각과 청각에 비해 센서와 디스플레이의 발전 속도가 더딘 편이다. 스마트폰에 탑재된 기술만 보더라도, 촉각은 센서나 디스플레이 모두 시각과 청각보다 사용자를 만족시키지 못하고 있다.
스마트폰에서 사용되는 터치스크린은 가장 기초적인 촉각 센서로서 입력 지점의 좌표밖에 알지 못한다. 사람의 피부에 비유하면 어느 지점에 무엇이 닿았다는 것만 알 수 있을 뿐, 어느 정도의 압력으로 눌리는지, 닿은 물체가 차가운지 뜨거운지 모른다는 것이다.
스마트폰의 촉각 디스플레이 장치로 사용하는 대부분의 진동자는 촉감 중 일부인 진동감만 제공하며, 이 진동감도 단일 주파수로 진동하기 때문에 세밀한 진동조차 만들지 못하고 있다. 상호작용에 있어서 시각과 청각이 촉각에 비해 더 많은 비중을 차지하는 이유도 있지만, 기술적으로 사람의 피부와 같은 촉각 센서와 사용자를 만족시킬만한 촉각 디스플레이를 구현하기 어렵다는 점이 더 큰 원인이라고 볼 수 있다.
여기서는 촉각 센서의 개념과 기술 현황에 대해 살펴보고 촉각 센서의 응용 및 전망에 대해 기술한다. 촉각 디스플레이는 전혀 다른 기술이므로 다음 기회에 소개한다.
변환기와 검출 회로로 구성된 촉각 센서
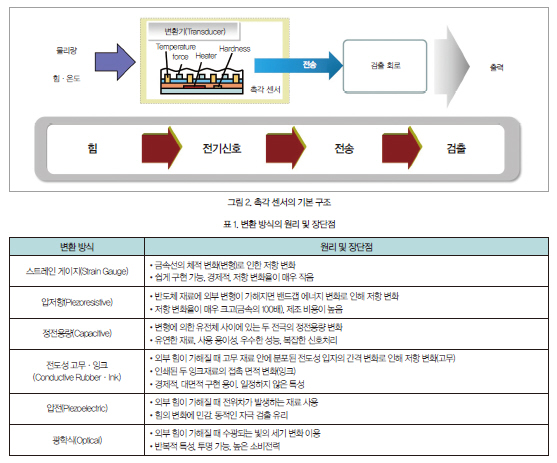
촉각 센서는 그림 2에 나타난 바와 같이 힘, 온도와 같은 물리량을 전기적 신호를 변환해 주는 변환기(Transducer)와 변환기에서 생성된 전기적 신호를 받아 검출하여 출력으로 내보내는 검출 회로로 구성되어 있다.
변환 방식(특히 물리적인 힘을 전기신호로 변환하는)에는 크게 스트레인 게이지(Strain Gauge)와 압저항(Piezoresistive), 정전용량(Capacitive), 전도성 고무·잉크(Conductive Rubber·Ink), 압전(Piezoelectric), 광학(Optical) 방식이 있으며, 표 1은 각 변환 방식의 특장점을 정리한 것이다.
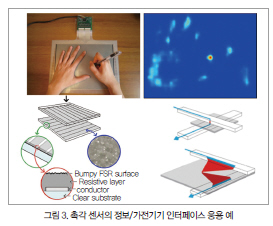
촉각 센서가 시각 및 청각 센서와 다른 점은 ‘분포형’이라는 것이다. 사람의 시각과 청각을 감지하는 센서는 눈과 귀라는 한정된 곳에 몰려있지만, 촉각을 감지하는 피부는 온 몸에 퍼져 있다. 따라서 촉각 센서는 변환기들이 공간상에 어레이 형태로 배치되어야 한다. 그림 3은 이를 위한 배선 방식이다. 아주 넓은 면적에 변환기가 드문드문 배치될 경우에는 직렬버스 방식이 유리하며, 공간에 조밀하게 배치될 경우에는 매트릭스 배선 방식이 주로 사용된다. 검출 면에 직접 배선하기 어려울 경우 외부 배선 방식을 사용하기도 한다.
기술 분류 및 해결 과제
사람의 피부와 같은 촉각 센서를 구현하려면 여러 가지 기술적 난제들을 극복해야 한다. 촉각 센서 구현 시의 어려운 점을 표 2에 정리했다. 앞에서도 언급했지만 촉각 센서는 분포형이므로 다수의 센서 소자 배치 및 배선 처리 문제를 극복해야 하며, 유연하고 얇게 구현되어야 할 뿐만 아니라 넓은 자유곡면(예를 들면, 구면)에 부착되어야 한다. 또한 물리적 접촉이 이루어지므로 내구성을 가져야 하며, 사람의 피부와 같이 다양한 물리량(수직압력, 미끄러짐, 온도, 진동감 등)을 검출할 수 있어야 한다.
아직까지 이러한 요구조건을 모두 만족시킬만한 촉각 센서는 나오지 않은 상태이다. 현재까지 개발된 촉각 센서 기술은 다음과 같이 크게 5가지 정도로 분류할 수 있다.
1. 무기 실리콘 기반 촉각 센서
MEMS(미소기전시스템) 기술을 이용하여, 압력이나 온도와 같은 외부의 물리량 변화를 감지할 수 있는 센서 어레이를 제작하는 방식이다. 우수한 성능을 가질 수는 있지만 무기 실리콘 재질의 특성상 휘어질 수 없으며 쉽게 깨진다는 단점이 있다.
2. 고분자(폴리머) MEMS 기술 기반의 촉각 센서
무기 실리콘과 달리 미세 패턴 공정이 가능한 폴리머(가령, Polymide) 재료를 사용하면 기계적인 유연성을 확보할 수 있다. 하지만 실리콘 기술과 다르게 신호처리를 담당할 트랜지스터를 같이 집적하기 힘들다.
유기물 기반의 트랜지스터도 최근 개발되고 있지만 아직 실리콘 기반의 트랜지스터 성능을 따라잡지 못하고 있다.
3. 정전용량 기반의 촉각 센서
이 센서는 평행한 두 전극 사이에 고무와 같이 압력을 받으면 변형하는 유전체를 넣은 구조이다. 압력이 가해지면 전극 간격 변화에 따른 정전용량 변화를 측정한다.
유연하며 측정 정확도도 우수하지만, 집적도를 높이기 위해 단위셀의 크기를 줄일 경우 정전용량이 크게 감소하므로 측정이 어렵고, 도선에 의한 부유 용량을 잘 처리해야 한다는 단점이 있다.
4. 전도성 폴리머 기반의 촉각 센서
수 마이크로미터 크기의 전도성 입자(가령, 탄소 입자나 금속 입자)를 폴리머 모재에 섞어 만든 압력감응소재를 이용하는 방식이다.
압력감응소재로는 압력감응고무(Conductive Rubber), 힘감응잉크(Force Sensitive Resistor), QTC(Quantum Tunneling Composite) 등이 사용된다. 가장 경제적이며 기계적 유연성과 강건성이 우수하다는 장점을 갖고 있지만, 전도성 고무나 QTC의 경우 전도성 입자를 폴리머 모재에 균일하게 섞기 힘들기 때문에 넓은 면적에 걸쳐 특성을 일정하게 유지하기 어렵고, 출력의 비선형성과 이력(Hysteresis)이 크다는 단점도 있다.
5. 나노소재를 이용한 촉각 센서
탄소나노튜브, 전도성 나노입자 등을 이용하여 압력감응소재를 만드는 방법으로, 탄소나노튜브를 방향성 있게 배열하여 비등방성 압력감지재료를 만들거나, 전도성 나노입자를 단일층으로 만들어 유전막을 경계로 여러 막을 쌓아 양자터널링 효과를 이용하는 등을 들 수 있다. 아직 연구 단계인 기술이며 신호처리 회로와의 통합 문제, 제조 비용 절감, 균질한 재료 합성 등 기술적 검증이 필요하다.
앞서 소개한 기술 중, 상업적으로 그리고 로봇 등에서 실제로 사용되고 있는 기술은 세 번째(정전용량)와 네 번째(전도성 폴리머) 기술 정도이다. 촉각 센서 기술에 대해 더 자세히 살펴보고 싶다면 참고문헌 [1]을 참조하기 바란다.
다음에는 촉각 센서가 어떻게 응용되고 있는지 알아보고, 그 성능과 한계에 대해 논의한다.
다양한 분야에서 응용되는 촉각 센서
촉각 센서는 사용 목적과 응용 분야에 따라 요구되는 특징이 다르다. 촉각 센서의 사용 목적은 크게 상호작용(Interactive), 촉감 검출(Tactile Sense), 제어 및 자동화(Control and Automation)로 나눌 수 있다. 또한 응용 분야는 크게 로봇과 메카트로닉스, 휴먼 인터페이스 분야로 나눌 수 있다. 
표 3은 각 목적과 분야에 따른 촉각 센서의 용도와 특징을 정리한 것이다.
그림 3은 TouchCo사에서 개발하여 UnmousePad라고 명명한 멀티터치 힘 감지 입력 패드이다.[2] 이 패드는 전도성 힘감응 잉크를 사용하여 제작됐으며 전극 패턴이 인쇄된 유연한 인쇄회로기판 한 쌍 위에 전도성 잉크를 각각 바른 후, 서로 겹쳐 놓았을 때 눌리는 힘에 따라 전도성 잉크 층이 서로 만나는 면적이 늘어나 저항이 줄어드는 것을 이용했다. 경제적으로 제작할 수 있고 유연하다는 장점이 있으나, 투명하지 않아 응용에 제한이 있다.
원리적으로 투명 전도성 잉크가 개발되면 터치스크린에 응용할 수 있지만, TouchCo사가 Amazon사에 인수된 후 아직 뚜렷하게 이 기술을 응용한 제품은 출시되지 않고 있다. 접촉 저항 효과를 이용하므로 근본적으로 품질이 균등한 제품을 만들어내기 어려운 문제가 있는 것으로 예측된다.
촉각 센서 기술의 또 다른 중요 응용 분야는 생체역학, 운동역학, 의료 분야를 들 수 있다. 신체 접촉에 따른 압력 분포를 측정하는 용도로 사용된다. 가령 신발을 신었을 때 발의 압력 분포를 알면 신발 디자인 시 유리하다. 나이키나 아디다스 등의 다국적 신발 기업들은 대당 몇 천만원을 호가하는 족압 측정 시스템을 수십 대씩 보유하고 있다.
또한 생체역학 쪽에서 보면, 걷거나 뛸 때 족압의 분포를 측정함으로써 운동하는 사람의 자세뿐만 아니라 바닥과 발의 접촉 부분을 자세히 살펴볼 수 있고, 앉았을 때의 압력(좌압)과 등쪽의 압력(등압)을 측정하면 의자나 좌석 형상 디자인 시 참고할 수 있다(그림 4).
의료 분야에서도 촉각센싱 기술이 응용되고 있는데, 맥진기와 유방암 검진기, 사람 이의 압력 분포 측정, 장기 입원 환자를 위한 등창 방지용 압력 매트, 수술용 로봇 등에 사용되고 있다. 그림 5는 이와 같은 응용 예를 나타낸 것이다.
로봇 분야는 촉각 센서 응용의 종착역이라고 볼 수 있다. 로봇 시스템은 손가락 끝과 같이 높은 공간분해능과 성능을 요구하는 센서부터, 등이나 팔과 같이 낮은 공간분해능을 요구하는 센서까지 다양한 촉각 센서 기술을 필요로 한다.
혼다의 대표적인 휴머노이드 로봇인 아시모의 손 구조 모양 특허를 살펴보면[3] 촉각 센서로 전도성 고무를 사용하고 있다는 것을 알 수 있다. 전도성 고무를 사용하고 있으므로 손가락 끝에 맞게 성형이 가능하며, 접촉 위치는 판별할 수 있으나 정량적인 압력분포를 측정하기는 어려울 것이라고 유추할 수 있다.
로봇에는 성형성이 우수한 압력감지고무(또는 QTC)[4], 전도성 힘감지 잉크기술[5]이 주로 사용되고 있으며, 공간분해능이 높지 않아도 되는 팔에 부착되는 센서로 LED를 이용하거나[6] 기존의 실리콘 기반의 압력 센서를 플렉서블 기판에 부착한 후 그 위를 부드러운 소재로 덮는 구조가 사용되고 있다[7]. 실리콘 기반의 압력 센서를 사용하면 센서의 반복 기능과 재현성이 우수하다.
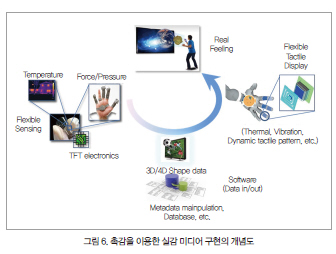
마지막으로 실감 미디어 분야에 대해 살펴본다. 최근 실감나는 몰입을 위해 시각, 청각뿐만 아니라 촉각 정보도 저장/편집/재생하려는 연구가 진행되고 있다.
그림 6에 그 개념을 나타냈다. 여기서 촉각센싱 기술은 사용자의 촉감을 저장하는(시청각으로 보자면 캠코더) 기기에 사용될 수 있다. 사용자가 촉각 캠코더로 물체의 촉각 정보를 획득하여 저장해 두면 나중에 이를 물체의 3D 입체영상과 함께 재생함으로써 사용자에게 깊은 몰입감을 제공할 수 있다.
촉각 센서 기술의 발전 방향
현재 기술 수준으로 봤을 때 인간의 피부에 필적할 만한 촉각 센서가 구현되려면, 향후 10년에서 20년 정도의 개발 기간이 필요할 것으로 예측된다.
2012년에 개봉된 로봇과 프랭크(Robot and Frank)라는 영화를 보면 머지않은 우리의 미래가 보인다. 영화는 로봇과 프랭크가 우여곡절을 겪으면서 서로 친구가 된다는 내용을 담고 있는데, 여기서 프랭크는 정신질환을 앓고 있는 노인이고 로봇은 이와 같은 독거 노인을 보살피기 위한 메디컬 휴머노이드 로봇으로 개발된 가정용 전자기기(Home Appliance)이다. 사람과 같은 피부가 없을 경우, 그 영화에서 로봇이 하는 작업은 대부분 실행될 수 없다는 것을 알 수 있다.
다행스럽게도 최근 나노재료 기술 및 플렉시블 전자소자/소재가 발전함에 따라 제한적으로나마 인간 피부에 근접한 성능을 보이는 센서들이 개발되고 있다.
여러가지 한계를 극복하기 위해서는 나노/마이크로 구조물의 대면적 제어/합성 기술, 반도체/폴리머 융복합 공정 기술, 플렉서블 센서 제조 기술, 폴리머 재료 기술 등이 함께 발전해야 한다.
이러한 기술들이 성공적으로 개발된다면, 미래의 인공 피부는 나노 기술을 이용한 내수성 합성피부를 재료로 사용하며 레이저로 진짜 피부처럼 모양을 내고 인공 모발을 이식함으로써 실제 피부와 구분하기 힘들 정도가 될 것이다. 또한 피부 표면 안쪽에는 탄소나노튜브 다발이 있어 압력과 온도를 동시에 감지하며, 이 정보를 실시간으로 처리하여 중앙의 CPU 또는 뇌(인공의수의 경우)로 보내게 될 것이다. 향후 20년 내에 이런 인공 피부로 덮인 안드로이드 로봇을 볼 수 있게 되기를 바란다.
Copyright ⓒ 첨단 & Hellot.net