



[헬로티]
로봇은 수십 년 동안 제조 환경의 일부였지만, 빅데이터에 기댄 인더스트리 5.0 의 등장은 로봇의 수적인 증가와 함께 로봇을 활용하는 더욱 유연한 자동화에 힘을 실어주고 있다. 물론, 거대한 케이지 안에 갇혀서 1분 단위로 자동차 범퍼를 찍어내는 로봇들도 여전히 필요하지만, 이들보다 더 유연하고 더 작은 ‘협동로봇(collaborative robot)’, 즉 ‘코봇(cobot)’ 역시 필요하다.
코봇은 기존의 일반적인 로봇에 비해 많은 장점을 제공한다. 그들은 작업 처리에 1일 이상이 소요되는 신규 임무도 신속하게 업무 인계를 받을 수 있도록 프로그램이 가능하다. 코봇은 사람들과 잘 어울려서 효율적으로 협업한다. 종종 코봇은 반복적이고 지루한 일을 떠맡아, 인간 작업자가 보다 복잡한 일을 처리할 수 있게 해준다. 무엇보다 코봇은 비용 효과적이다. 이는 중소기업도 자동화를 도입할 수 있게 해준다는 것을 뜻한다.

코봇이 차세대 산업혁명인 인더스트리 5.0을 앞당기고 있다. 2018년 6억4,910만 달러로 평가되는 전 세계 코봇 시장은 2025년까지 연평균 44.5%의 놀라운 성장률을 기록할 것으로 전망된다.

사진. 출처: Zapp2Photo/Shutterstock.com
코봇의 산업용 팔
산업용 로봇 팔은 인간의 팔과 같은 일종의 ‘조작기(manipulator)’이다. 인간의 팔 관절이 근육에 의해 움직이는 것과 달리, 코봇의 기계적 관절은 외부 동력원, 통상적으로 전기 모터에 의해 움직인다. 이 팔들은 무거운 것들을 들어올리는 리프팅을 담당하고 컴퓨터 소프트웨어는 두뇌 역할을 한다. 비전 및 모션 감지 시스템은 물체를 인식하고, 그 정보에 따라 행동하도록 돕는다.
근접 센싱
코봇은 우리에 가둬두지 않기 때문에 일정 범위의 안전 조건을 충족해야 한다. 작업 실행 중에는 근접 센싱을 활성화해야 한다. 그러면 작업자가 너무 가까이 올 경우, 안전을 위해 작업을 정지해야 한다는 것을 안다. 또한 보다 정교한 비전 시스템은 작업자가 자신에게 다가오는 이동 속도를 모니터링하여 정확한 시간에 작업을 멈췄다가, 작업자가 돌아가면 동작을 재개할 수 있다. 근접 센싱 외에도, 작업자가 표준 비상 정지(E-stop) 버튼을 사용하여 코봇의 동작을 중단할 수 있어야 한다.
힘 센싱
코봇은 또한 작업할 때 자신의 힘을 어느 정도로 제어해야 하는지도 알아야 한다. 예를 들어 달걀을 취급하는 픽앤플레이스 코봇은 금속 베어링을 취급하는 코봇과는 다른 세기의 힘을 쓸 수 있어야 한다. 힘 센싱(force-sensing)은 기계 팔의 중요한 측면이며, 그에 따라 반응을 조절하기 위한 임베디드 센서가 필요하다.
제조 또는 그밖에 다른 애플리케이션에서, 기계 팔은 용도에 따라 소프트 그리퍼(soft gripper)에서 진공 컵에 이르기까지 다양한 엔드-오브-암(end-of-arm) 도구 옵션을 갖고 있다.
코봇의 구성품
로봇 팔을 제어하는 컴퓨터 ‘두뇌’는 항상 모든 관절의 현재 각도 위치를 감지할 수 있어야 한다. 이는 코봇 팔 뿐만 아니라 재래식 케이지 로봇(cage robot)을 포함한 모든 산업용 팔에 대한 제어 알고리즘의 적절한 기능을 위한 기본적인 요건이다. 이 로봇들은 관절의 위치를 감지하기 위해 관절 모터에 통합된 특수 목적용 센서를 필요로 한다. 로봇 제조회사로서는 이들 센서는 매우 핵심적인 소자들이다.
이들 센서는 공장 바닥에 가해지는 하중 때문에 접합부가 뜨거워지는 경우에도 로봇의 작업 수명 내내 안정적으로 작동해야 한다. 이러한 센서의 핵심 요건 중 하나는 매우 좁은 공간에 장착할 수 있어야 하는 능력이다. 암 링크를 재설계할 때마다 센서는 일치하는 제품을 선택해야 한다. 일반적인 BOM(bill of materials)을 가진 로봇 제품군을 설계하기 위해서는 이러한 센서를 다양한 크기로 사용할 수 있게 하는 것이 중요하다.
TE 커넥티비티(TE Connectivity)의 인더스트리얼 리졸버(Industrial Resolvers)는 이러한 요건에 잘 맞는 제품이다. 이 제품은 산업용 서보 모터를 위한 아날로그 각도 위치 센서다. 이들 중공축(hollow-shaft) 고정밀 리졸버는 보다 신뢰성이 높을 뿐만 아니라 작은 풋프린트 요건에 맞게 설계되어 맞춤화가 가능하고 유연성이 뛰어나다.
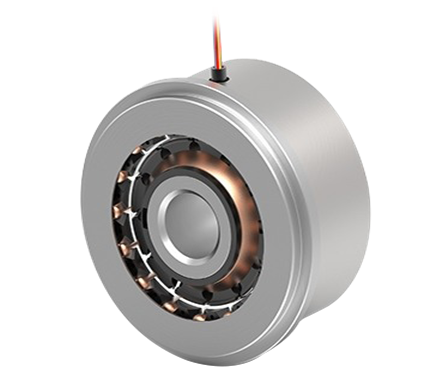
그림 1. TE 커넥티비티의 인더스트리얼 리졸버는 360도 전체에 걸쳐(버전에 따라 다름) 절대 각도 정보를 제공한다(출처: 마우저 일렉트로닉스).
모든 산업용 로봇과 마찬가지로, 코봇 역시 안정적으로 동작하기 위해서는 전력 공급이 필요하다. 제어신호, 전력, 전력전자부품 연결에는 많은 설계 옵션이 있다. 어떤 경우이든, 이 전원과 신호를 전달하는 커넥터는 상당한 양의 기계적 비틀림과 휨을 견뎌야 할 뿐만 아니라 산업 표준을 준수해야 한다. 회로 간 연결이 가능한 인쇄회로기판(PCB)에 와이어를 연결하는 와이어-투-보드 커넥터는 설계에서 선택할 수 있는 핵심 부품이다. 다시 말해, 일반적인 BOM은 여러 구성을 혼합하고 일치시킬 수 있는 관련 커넥터 제품군을 지시할 수 있다.
TE 커넥티비티의 엘콘 마이크로 와이어-투-보드 파워 솔루션(ELCON Micro Wire-to-Board Power Solutions)은 일반적인 산업용 3mm(컨택트 피치) 풋프린트에서 핀당 최대 12.5A의 고전류 밀도를 제공한다. 이러한 일반적인 산업용 풋프린트는 설계자와 엔지니어가 기존 설계로 쉽게 업그레이드할 수 있도록 하는 설계 유연성을 제공한다.
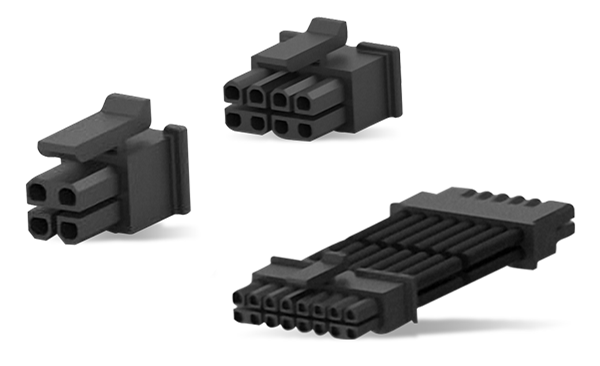
그림 2. TE 커넥티비티의 엘콘 마이크로 와이어-투-보드 파워 솔루션은 서로 다른 와이어 크기의 다양한 조합을 통해 2핀 ~ 24핀 구성 및 여러 전류 사양을 지원한다. (출처: 마우저 일렉트로닉스)
TE 커넥티비티의 이러한 커넥터 제품들과 같은 소자들은 기업들이 그들의 특정 공간 제약과 프로그래밍 요건을 충족하도록 코봇을 설정하는 데 도움이 된다.
자동화가 계속 확대됨에 따라 코봇은 이러한 자동화 확산 추이를 가속화하는 데 있어서 중요한 역할을 할 것으로 예상된다. 차세대 산업 혁명인 인더스트리 5.0은 이미 우리 앞에 성큼 와 있습니다. 코봇은 조립 라인, 부품 조립, 구동 나사, 연마, 검사 및 기타 일상적인 작업에 사용할 수 있다.
코봇 구동 기술 또한 첨단 컴퓨터 비전 및 센싱 능력의 발전과 함께 더욱 정교해지고 있다. 코봇은 갈수록 더 적은 리소스로 더 많은 일을 하도록 요구될 것이기 때문에, 차세대 코봇 개발에서는 TE 커넥티비티의 솔루션들과 유사한 소자들을 필요로 할 것이다.
마우저 일렉트로닉스











































