



[첨단 헬로티]
제조용과 협동로봇으로 대표되는 로봇사업 부분 기술개발은 기존의 주력산업인 산업용 전동기 부분의 성장 둔화 예측과 염가형 수입제품 확대 동향 그리고 당시 새로운 전략 상품으로 개발자원을 집중한 서보모터와 드라이브 부분조차도 실질적으로 접근 가능한 시장에 한계가 있다는 판단 등에 따라 시작되었다. 기존 주력제품의 경쟁력 확보는 별도로 하고, 로봇사업 부분은 작은 규모지만 독자적인 기술 능력을 보유한 서보드라이브와 모터를 중심으로 기술 변화에 순응한 제품개발을 통해 시장 확대를 도모하기 위한 방법론 도출 과정에서 자연스럽게 중장기 기술개발 방향이 도출되었다(그림 1). 이 글의 구성은 로봇 시장의 기술동향과 로봇 분류, 제조용 로봇과 협동로봇의 차별성 등에 대해 설명한다. 그리고 로봇구동용 부품단위의 요소기술과 실증 사례를 소개한다. 또한, 시장 요구와 로봇사업 추진 방향에 대해서도 언급한다.

▲ 그림 1 현재 주요 생산품

로봇 시장 및 기술 동향
대체로 주지하는 바와 같이 제조현장 인력 1만 명당 로봇 보급 대수는 독일과 일본이 각각 301대, 305대이고, 한국은 세계 최고 수준인 531대로 보고되었다(그림 2). 또한, 로봇산업은 제조업을 중심산업으로 선택한 모든 국가로부터 미래 산업으로 언급되고 있다.
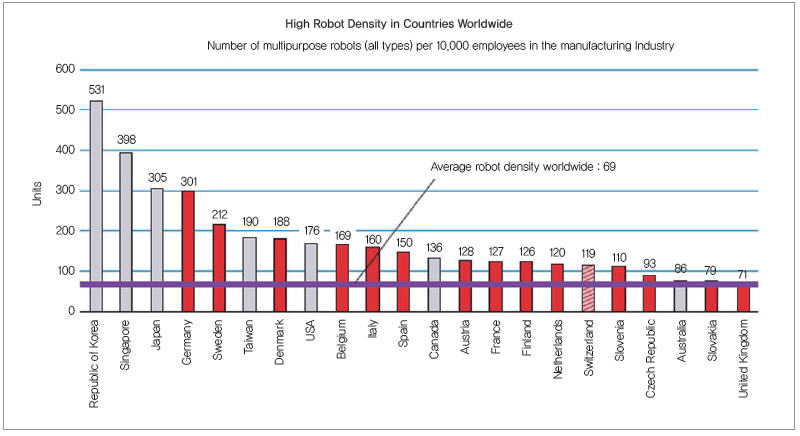
▲ 그림 2 국가별 제조현장용 고용인구별 로봇보급 현황
이런 배경에서 국내 제조용 로봇이 계속 관심을 갖는 이유 중 하나는 보급된 로봇 구성 형태 중 약 70%가 직교좌표로봇에 기반을 두고 있다는 것이다. 그리고 다관절 로봇을 생산 보급하는 국내기업은 단 한 개사에 불과하다는 점과 이 로봇조차 대부분 국내용과 수출을 포함해도 자사 내 물량에 기반하고 있다는 것이 로봇 선진국의 로봇산업 구성 형태와 차이가 있다는 점이다.
이렇게밖에 될 수 없는 배경에는 국내 산업구조의 특징이 기여한 바가 크다고 생각한다. 직교좌표로봇이나 스카라로봇 등은 초 경량부하인 전기전자 및 반도체 부품산업에 최적화 되어 있고, 다관절로봇은 자동차산업을 중심으로 생산성과 직결되는 용접, 조립, 도장공정이 최대 수요처이다. 그 외 분야로는 공작기계 관련 부분으로 정밀가공, 연마, 디버링 용도에 활용되는데, 국내 제작보다는 대부분 고성능 로봇제품을 도입 운용하는 것이 현실이다.
1. 시장 규모와 구성기술
글로벌 시장 동향을 보면 제조용 로봇은 앞으로도 꾸준한 성장이 예상되고, 최근 협동로봇 또는 협업로봇으로 불리는 로봇은 이제 시장이 형성되는 초기단계에 진입한 것으로 보고되고 있다. 얼핏 보면 새롭게 시작하는 협동로봇은 기존의 제조로봇과 다르지 않겠는가 하는 기대와 또 적극적으로 이 시장에 진출하는 기업들의 소식을 접하게 된다. 그러나 과연 시장이 충분히 형성되어 가면 기존 제조로봇 기업이 그냥 있을지에 대한 판단은 각자에게 맡긴다.
시장의 성장과 병행해서 새롭게 요구되는 기술 분야가 늘어간다. 이에 대해서는 다음 그림 3으로 설명을 대신한다.
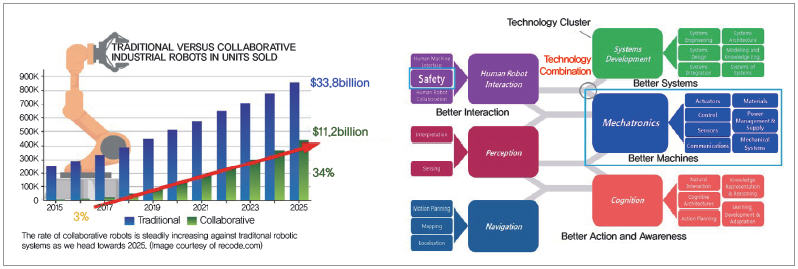
▲ 그림 3 로봇 시장 및 구성 요소 기술
2. 로봇 구성 형태와 분류
로봇을 카테고리별로 정리하고 통용되는 명칭과 대표적인 이미지를 정리한 자료를 그림 4에 나타내었다. 로봇의 종류는 그 개발 목적과 구성방식에 따라 다양한 형태를 보이고, 운용상 동원되는 기술도 차별화된 요소가 많다. 휠로봇이나 보행로봇도 각기 다른 이미지와 명칭으로 분류 가능하다.

▲ 그림 4 로봇 구성 형태에 따른 분류
이 글에서는 제조업과 서비스업 분야에서 주로 운용 중인 고정형 로봇 분야로 제한하도록 한다. 이 로봇 분류에는 직교로봇, 팔레타이징로봇, 스카라로봇이 있고, 암 로봇으로 흔히 불리는 다관절 형태의 직렬로봇과 델타로봇으로 불리는 병렬형 로봇 등이 모두 포함된다.
협동로봇 또는 협업로봇이라고도 불리는 로봇도 결과적으로는 이 분류 중 하나이고, 다만 그 용도가 제조용보다는 사람과의 공존에 방향을 두고 발전한 것으로 해석할 수 있다.
3. 제조용 로봇과 협동로봇의 차별성
제조용 로봇시스템이건 향후 일반현장에서도 자주 목격하게 될 협동로봇이건 간에 구성방식의 차별성 이외에 동력 및 모션제어 관점에서는 유사성이 대단히 높다. 제조용은 앞서 설명한 바와 같이 각 용처별 생산성 향상에 초점을 둔 고속 고정밀 처리에 방점이 있다면, 협동로봇은 제조를 포함한 모든 현장에서 사람과의 공존이 목표이므로 충돌안전이나 직접교시와 같은 부분에 방점을 두고 있다는 점이다. 이런 관점에서 사용환경과 공급전압의 체계, 궤적발생을 위한 티칭방법 등에 차이가 있다. 이와 관련된 내용을 그림 5에 나타내었다.
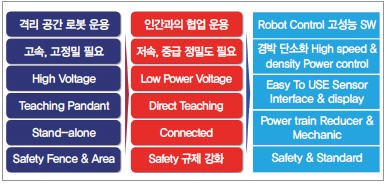
▲ 그림 5 제조용 및 협동로봇 특징 비교와 요소 기술 개발 방향
로봇 구동부품과 그 구성 요소
로봇 구성기술 개발은 2013년부터 실질적으로 시작되어 로봇 구동에 필요한 핵심 기술을 선정하여 지속적으로 추진해 왔다. 내부자원을 통해 반드시 확보할 분야는 소프트웨어와 전기전자통신 분야로 제한했고, 이에 따라 로봇모션제어기, 서보드라이브, 서보모터, 인코더를 그 대상으로 선정하였다. 이중 서보드라이브와 모터 부분은 보유기술을 기반으로 확장하는 형태를 취했고, 로봇모션제어기와 인코더 부분은 적극적인 자원투입을 통해 추진했다. 다양한 형태의 감속기와 주조 또는 정밀가공에 기반한 기구 구성요소는 철저히 전문기업과의 협력을 전제로 추진해 왔고 앞으로도 그럴 예정이다.
이 과정에서 각 분야별로 유사성 있는 요소기술을 개발한 대학과의 공동기술개발, 소프트웨어 체계 개발을 위한 외국기업 및 연구인력의 활용 등이 많은 도움이 되었다. 그러나 궁극적으로는 이를 수용하고 소화할 내부 자원을 육성하지 못하면 생동하는 기술이 될 수 없다는 경험도 하게 되었다. 다음절에는 각 분야별 관련기술을 설명한다.
1. 모션&로봇 제어기
모션제어기나 로봇제어기가 제품으로서의 로봇용 전장반을 의미하지 않는다는 점을 먼저 설명한다. 흔히 자동화 현장에서 사용되는 제어기 중 가장 보편적인 것이 PLC이고 경우에 따라 PAC로 불리기도 한다. 사전적 정의와는 별도로 산업현장에서는 온-오프제어를 주목적으로 사용하는 시퀀스 제어기를 PLC라는 용어로 통용한다. 이중 대표적인 제품이 미쓰비시의 Q시리즈, 옴론의 NJ시리즈, LS산전의 XGT시리즈 등이 있다.
또한, 특정한 기구학을 수반하지 않고 임의의 궤적을 제어하는 연속제어 기능을 갖는 제어기를 모션컨트롤러라고 하고, 대표적인 제품에는 야쓰가와의 MP시리즈, ACS와 엘모의 모션컨트롤러, 소프트모션의 WMX 등이 있다.
PLC나 모션제어기는 PLCopen에서 규정한 IEC61131-3 규격에 따라 개발되고 확장 발전되는 것이 국제적인 표준이다. PLCopen에서는 전통적인 PLC 언어의 표준화를 기초로 하고, 모션컨트롤을 구현하는 라이브러리를 PLCopen Motion Control, Fluid Control, OPC-UA, Homing 및 Safety 부분 등 방대한 내용을 정의하고 있다(그림 6). 특히 PLCopen Motion Control은 Single axis와 Multi Axis 구동 부분과 로봇기구학을 포함하는 Function Block인 Coordinate Motion Library가 정의되어 있다.
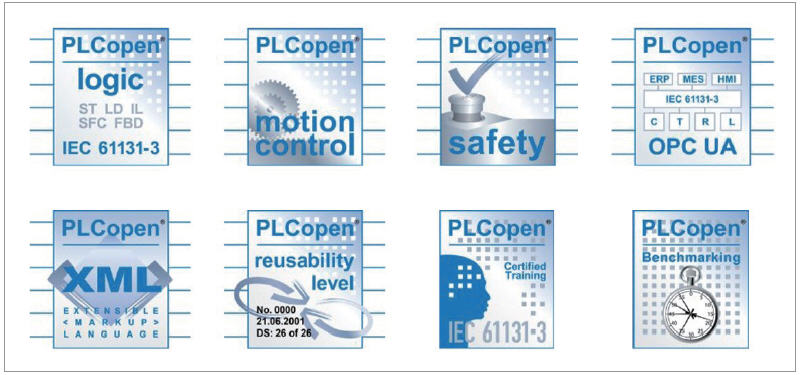
▲ 그림 6 PLCOpen 구성 내용
로봇용 제어기는 거의 모든 로봇제조사에서 독자적으로 제작하고 로봇시스템과 세트화해서 공급하는 것이 현재까지 상식으로 통한다. 로봇 분야의 시장 선도기업인 쿠카, 화낙, ABB, 야스카와, 현대로보틱스 등 모두가 동일하다. 다만, 소수이기는 하지만 기구학을 편집할 수 있으며 로봇제어에 직접 활용이 가능한 제어기도 소개되고 있고, 이중 대표적인 사례로 KEBA의 KeMotion을 들 수 있다. 그 외에 로봇제어용 Open Source인 ROS, 이를 바탕을 국내에서 시도된 OPROS 및 교육용 분야에서 소개된 ROBOTIS 등과 같은 소프트 기반의 로봇제어 플랫폼이 있다. 대부분의 이런 류의 제어기는 하드웨어는 산업용 PC를 기반으로 구성하고 Text언어 기반을 사용자 프로그램 개발환경을 갖는다. 이 분야의 보다 상세한 내용은 독자에게 남긴다.
(1) 로봇제어기 구성
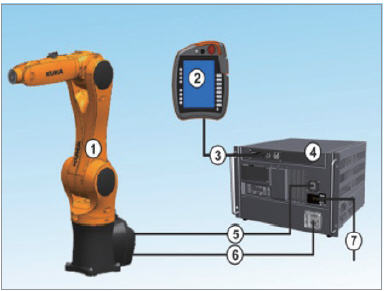
다음 그림에는 상용 로봇시스템의 대명사인 쿠카의 로봇제어용 전장 구성과 반과 제어기 구성 관계를 나타냈다 (그림 7, 그림 8).
▲ 그림 7 모션제어기 사용자 개발환경 구성

▲ 그림 8 로봇용 전장반 구성(KUKA사)
이 전장반 내부에는 각 관절용 모터를 제어하는 드라이브와 로봇 모션을 제어하는 로봇제어기가 장착되어 있다. 이중 로봇제어기의 기능 구성을 다음 그림 9에 나타냈다. 제어기를 실질적으로 구성하는 부분은 Robot Control, PLC, CNC를 포함한 Motion, Safety 처리 부 등으로 구성되고 여기에 고속 네트워크 기능을 통해 주변기기 및 드라이브와 접속한다.
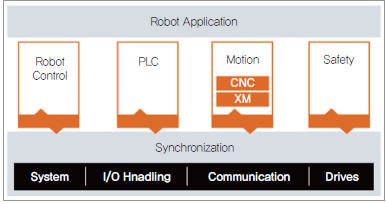
▲ 그림 9 로봇제어기 기능 구성
이들 기능 구성을 소프트웨어 블록으로 구체적으로 표현한 것이 다음 그림 10의 구성 기능 상세이다.
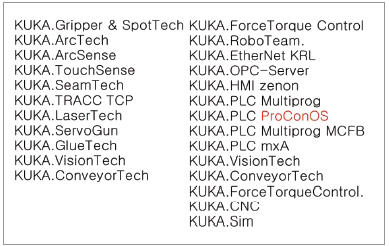
▲ 그림 10 로봇제어기 구성 기능 상세
(2) PLCopen과 KOSMOS
앞서의 그림에서 Multiprog, ProConOS 등의 용어가 보인다. 이것은 PLCopen 상용엔진을 탑재하고 있다는 표현이다. 상용화한 PLCopen 엔진이 대표적인 기관으로는 CoDeSys, IsaGrafe, Phonix 등이 있는데, 쿠카의 경우는 Phonix의 PLCopen 엔진을 탑재했다는 의미이다. 물론 이것이 모두라는 것은 아니지만, 시작은 여기서부터라는 점을 강조한다.
PLCopen 엔진 확보가 전제되어야 하고, 이 위에 CNC, Vision, OPC-UA 등 다양한 용도의 기능개발이 추가되어 로봇제어기가 구성된다는 의미이다. 따라서 PLCopen 엔진과 부가되는 기능개발이 모션제어기나 로봇제어기 개발의 방향이고 목표이다.
이를 위해 하이젠모터에서는 오랜 기간에 걸쳐 KOSMOS 엔진 개발을 지속해 왔고, 현재 이를 탑재한 모션제어기로 u-PLC와 GMC를 상용화 하였다. 로봇제어기에 특화된 CNC 커널과 3D_Motion Viewer 등을 순차적으로 집적해서 HMC 시리즈를 상용화할 예정이다. 개발된 제어기를 탑재한 직교로봇, 델타로봇 등은 보급사례가 있고, 다관절 로봇은 금명간 전시회를 통해 소개할 예정이다.
그림 11과 그림 12에 KOSMOS IDE와 Motion Library를 나타냈다. 로봇용 전용제어기 수준으로 발전하기 위해 수행할 많은 난제들이 있지만, 최소한 자유롭게 확장하거나 개조할 수 있는 여지가 있으므로 노력의 문제라고 생각하고 기술개발을 지속적으로 수행할 예정이다.
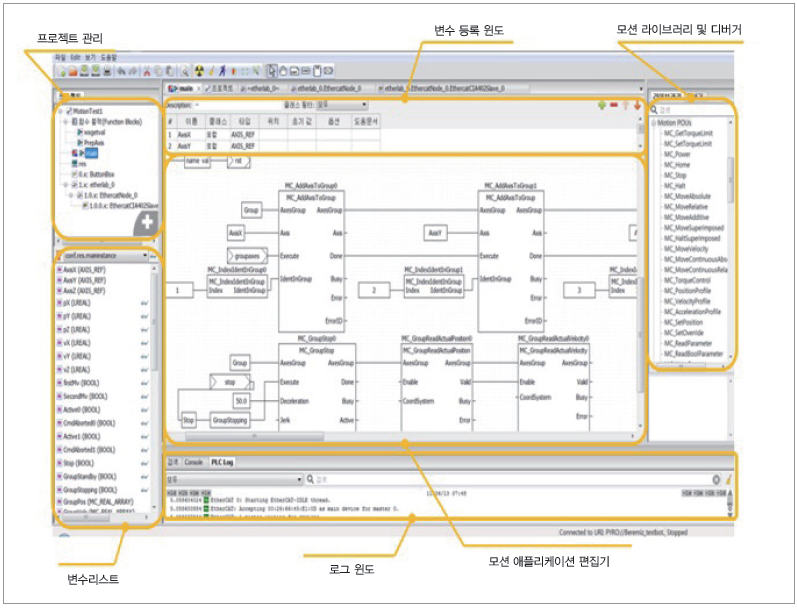
▲ 그림 11 KOSMOS IDE
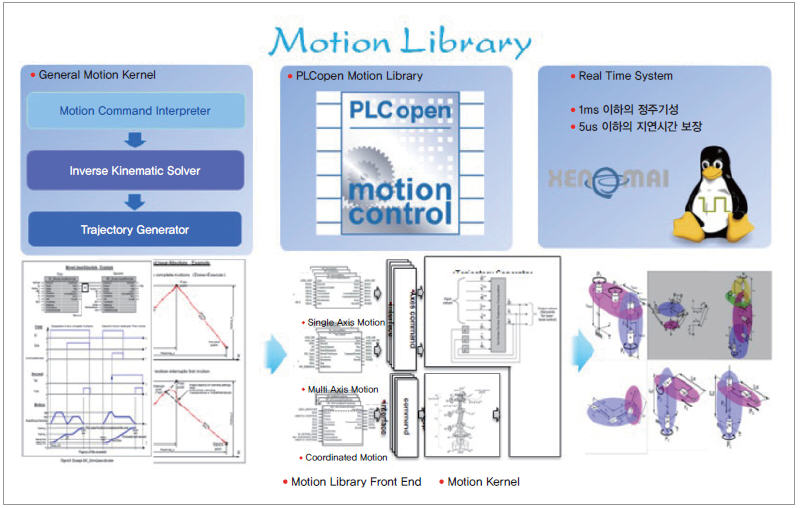
▲ 그림 12 KOSMOS Motion 라이브러리와 로봇기구학
개발된 GMC 하드웨어에 KOSMOS IDE를 활용해서 실제 로봇에 적용한 사례를 그림 13에 나타냈다.

▲ 그림 13 모션제어기로 구성한 수직다관로봇, 델타로봇 구동사례
2. 드라이브
드라이브 부분의 최근 발전 방향은 ‘제어기 고성능화’, ‘네트워크 다변화’, ‘인코더 고분해능화’ 그리고 ‘Safety 기능’이다. 또한, 외견상 나타나지 않지만, 제어기기의 고성능화는 하드웨어에 의한 고속응답성과 함께 현장 사용상의 편리성을 지원하는 ‘자동튜닝기능’과 ‘진동억제기능’ 이 포함된다. 고속필드버스 기능에 의한 드라이브의 다축 실시간 병렬 운전과 상위 모션제어기와의 인터페이스 기능 등이 드라이브 성능을 결정하는 형태로 발전되고 있다.
이런 제반 사항을 수용하기 위해서는 Real Time OS에 기반한 제어플랫폼 디자인과 운용소프트웨어 개발이 병행되어야 한다.
그림 14에는 네트워크 기능을 탑재한 모듈형 드라이브의 구성사례를 나타냈고, 그림 15에는 다양한 방식의 필드버스 명칭과 워킹그룹을 나타냈다. 국내에서는 최근까지 CC-Link나 Mecatro-Link 방식이 지배적이었으나, EtherCAT 등 개방형 프로토콜이 급속히 보급되는 추세이다.

▲ 그림 14 고속필드버스 기반형 서보드라이브 접속 예
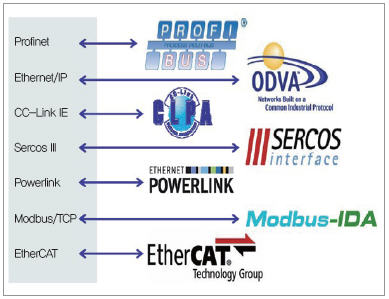
▲ 그림 15 필드버스 시스템 예시
개방형 프로토콜이 제공하는 장점은 특정한 제어기에 종속될 필요가 없어진다는 점이다. 호환성이 상호 검증되면 제어기 또는 드라이브 선택은 소비자의 몫이 된다. 공급자 입장에서도 다양한 종류의 모션제어기나 로봇제어기와 시스템을 구축할 수 있으므로, 이 분야의 다양성 확보가 또 다른 제품 경쟁력을 나타내기도 한다.
모션 또는 로봇제어기는 다축 병렬운전제어가 필수적이다. 이를 위해 제어기는 고성능의 필드버스 기능을 지원해야 한다. 현장에서 요구되는 최소한의 필드버스 방식으로는 Modbus, CANopen 등을 들 수 있고, 고성능 네트워크 기능 구현방식으로는 EtherCAT, Profinet, PowerLink 등이 있다. 각 방식에 따라 호환성 테스트 방식에 따라 자체인증으로 갈음하는 경우와 공식인증을 수행하는 경우로 구분할 수 있다.
네트워크 체계의 제반 성능이 확보되면 그 다음에는 사용 전원과 출력 용량이 중요 요소가 된다. 국내의 경우, 표준화된 드라이브는 50W ~ 75kW급까지의 공급범위를 갖추고 있고, 다관절로봇용의 각 축별 모터 출력 범위는 대부분 4.5kW 전후가 일반적이다.
제조용 로봇 시장에 적용되는 드라이브는 최신의 DSP 탑재에 따른 고성능화 외에 공급전원 다양성과 구조적인 모듈화를 특징으로 한다. 모듈화가 갖는 특징은 AC 또는 DC 입력전원의 선택적 사용이 가능하도록 독립된 전원모듈을 갖추었고, 개별 축 제어는 출력 용량별로 모듈화된 드라이브가 담당하는 구조가 보편화 된 구성이다.
로봇 또는 자동화 현장에서는 다수의 서보모터를 구동해야 하고, 모션제어기와는 필드버스 네트워크를 통해 제어지령을 수행해야 한다. 한 예로 6축 또는 7축형 다관절로봇의 경우는 형태는 어떻든지 간에 6~7대의 서보드라이브가 필요하고 이를 전장반 내부에 수납해야 한다. 이 경우 수전 부분을 공통화하고 서보모터 출력 부분만 개별 제어하는 모듈형을 택한 형태와 각 축제어용 드라이브의 메인 보드 부분을 단일 PCB상에 집적시키고 나머지 전력제어용 AMP만 개별 구성하는 형태가 있을 수 있다. 대체적으로 가반하중이 작은 소용량 출력형은 PCB 일체형을 선호하고, 중하중용 이상은 모듈형 드라이브를 선호하는 형태를 취한다. 모듈형이 갖는 장점으로는 전원회생모듈을 선택적으로 적용할 수 있다는 점과 근본적으로 드라이브 내부용 제어전원을 완전히 분리시켜 상대적인 안정성을 확보하는데 용이한 구조라는 점이 특징이다.
협동로봇 분야는 근본적으로 고출력을 요구하지 않고, 사람과의 공존을 목표로 하기 때문에 실제 출력제어에 사용하는 전원은 저전압 체계를 선호한다. 대부분 협동로봇용 구동모듈은 각 관절구성체 내부에 하모닉드라이브, 모터, 제어기, 인코더 및 브레이크 등을 모두 일체화 해서 구동축 부분을 중공형 구조를 갖도록 처리한 말 그대로 올인원 구성방식과 제어기를 분리하고 나머지를 일체화하는 형태로 구성하는 방식으로 구분된다.
이런 구분은 로봇디자인에 부합하는 상용드라이브 확보가 불가능한 상황에서 구동모듈을 구성하기 위한 현실적인 선택 때문이 아닐까 추정한다. 협동로봇 분야의 구동부품들은 배터리 전압체계와 관련되어 모바일 환경에 특화된 모터와 제어기 활용이 용이하다는 특징도 있다.
여기서 저전압 구동모터를 대부분 BLDC라고 부른다. 그러나 실제 모터의 구성특징을 보면 대부분 박형 구조의 PMSM이고, 드라이브 출력형태를 기준으로 하면 BLAC로 분류할 수 있다.
이런 배경에서 DC 24~48V 전원을 표준으로 하는 ARES 시리즈가 본격적인 출시를 앞두고 있다. 이 시리즈 제품은 오프라인 환경에서 운용되는 다양한 형태의 로봇시스템과 온라인에서 사용되는 협동로봇모듈에 활용이 가능한 특징을 갖췄다. 기존의 드라이브와 달리 협동로봇 운용상태에서 요구되는 위치, 속도, 토크용 Cycle Mode와 각각에 대한 Profile Mode 기능이 반드시 요구되므로 이를 탑재하였고, 현장 사용에 필요한 디버깅 환경이 제공된다.
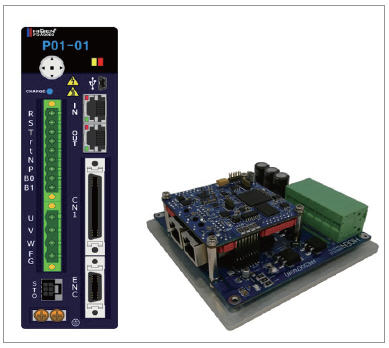
▲ 그림 16 차세대용 H1G 시리즈 서보드라이브

▲ 그림 17 모바일환경용 모듈형 드라이브 AreS_Q
서보모터
제조현장에서 운용되는 서보모터의 속도 범위는 10,000rpm 전후의 중속영역, 출력으로는 11kW전후의 영역대역이 주로 사용된다. 제조 로봇은 대부분 이 영역에 포함된다. 다만 전통적으로 유압을 동력원으로 하는 분야에서는 대용량화에 대한 요구가 점증하고 있다.
시장에서의 요구에 따라 75kW 출력범위까지는 표준형 제품들이 공급되며, 그 이상 고출력 대역은 주문자 사양에 따라 제한적으로 공급되는 것이 국내 현실이다. 용량 확대와는 별도로 감속기 사용 배제를 목표로 Direct Drive 모터 등의 필요성이 점차 증가하는 추세를 보인다.
공급전원 선택도 중요한 요소이다. 대체적으로 일본으로부터 도입된 제품들은 기존과 같이 AC220 계열이 대부분이고, 고출력형은 대부분 유럽형 제품으로 AC400 계열이 일반적이다. 이들 모터가 요구하는 공통 특성은 고효율화인데 영구자석을 적용하는 서보 모터에 있어서의 손실은 철심에 의한 손실이 지배적이기 때문에 전동기 효율 향상은 철심재료에 대한 의존성이 강하다. 특히 상용 주파수를 넘어서는 고주파 운전영역에서는 철손과 상관관계가 강하며 철심재료의 저철손화가 모터 효율 향상의 결정적 요인이다.
또한, 스탬핑 시 강판의 경도 증가에 따라 금형 마모가 촉진되므로 고효율화를 위해서는 자기적인 특성뿐만 아니라 경도를 적정한 수준으로 제어할 필요가 있다. 현재는 수급에 큰 문제는 없지만, 영구자석의 안정적인 확보는 모터 제조공정에서 중요한 위치를 차지함으로 영구자석 사용량 저감을 위한 지속적인 기술개발이 중요하다.
이와 함께 보다 정숙한 구동특성을 담보하는 방법으로 회전자 극수 증가도 새로운 추세이다. 그림 18에는 열해석 사례와 전자기 해석 사례를 나타냈고, 그림 19에는 고출력 전동기의 실부하 실험 사례를 보였다.
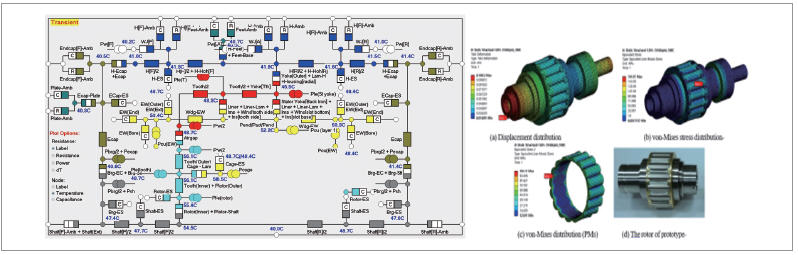
▲ 그림 18 서보모터 요소별 온도분포도
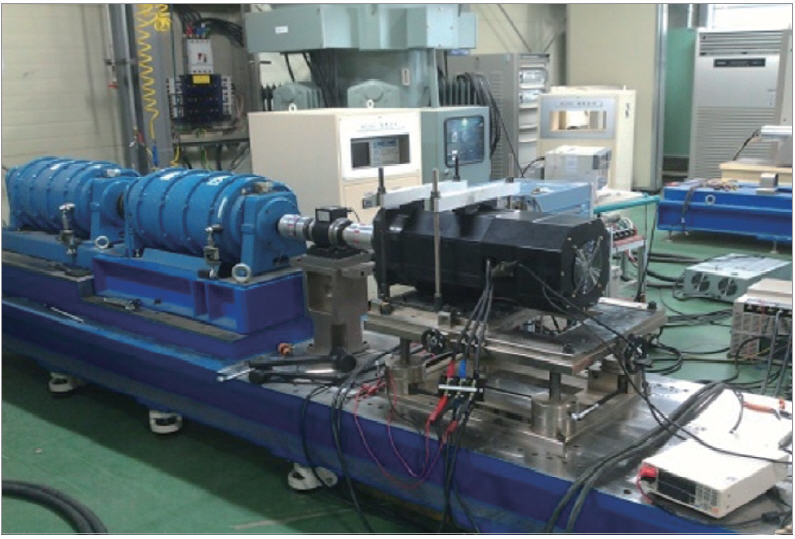
▲ 그림 19 실부하 시험 장치 구성도
고정밀 센서
로봇관절을 정밀하게 제어하기 위해서는 인코더로 불리는 고정밀 피드백 센서가 대단히 중요한 역할을 담당한다. 고정밀 센서는 서보모터의 자속각을 검출하는 용도로 사용된다. 이를 인코더라고 하고, 과거 광학식에 기반한 증분형 인코더가 일반적이었으나 분해능 향상에 물리적인 제약이 있고, 이를 해소하는 방식으로 아날로그 출력신호에 보간 기능을 더해서 분해능을 극단적으로 확대한 후 이를 고속통신으로 처리하는 시리얼 인크리멘탈 인코더, 이와 유사한 방식으로 절대치 정보를 고속 전송하는 시리얼 ABS 인코더가 널리 사용된다.
특수한 활용의 예로 로봇 암 등의 연결구조에 적합한 마스터 및 슬레이브 연결 구조를 갖는 네트워크 기반형 인코더도 보급된다. 고진동이나 고충격 환경에서 구동해야 하는 서보모터에서는 리졸버의 활용이 당연하겠지만, 일반적인 산업 환경에서는 광학식인코더가 널리 사용 중이다.
광학식인코더는 이미 단위회전당 분해능이 2~21Bit를 넘어서는 정도이고 기존 광학식 인코더의 가장 취약한 특성이었던 Glass 부분도 수지계열 재료가 채택되는 등 발전이 있고 자기식을 활용한 새로운 형태의 인코더도 소개되고 있다. 일반화된 증분형 인코더는 자기식이 있고, 17bit ~ 23bit급의 시리얼인코더는 기술개발 자체보다는 이 인코더에 탑재한 통신체계와 부가적인 운용기술 개발이 중요하다.
로봇 분야와 일반 분야용이 확연히 차별화되는 부분은 시리얼 인코더를 통한 구동기의 실시간 상태모니터링 기능지원 유무이다, 한 예로서 실시간 출력토크나 부위별 온도데이터 등을 실시간으로 드라이브와 모션 또는 로봇제어기에 피드백한다면 고장예지 기능이나 상황에 따른 출력억제 제어 등이 구현 가능한데, 이런 부분은 잘 드러나지 않는다. 또한, 인코더를 중공형 또는 듀얼 피드백형 등으로 로봇이 필요로 하는 형상에 맞춰 자유롭게 취급할 수 있어야 한다. 이런 부분 모두가 제조용과 협동로봇 모듈의 경쟁력과 직결되는 요소이다.
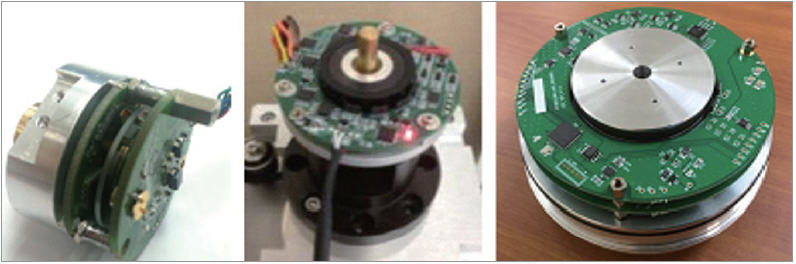
▲ 그림 20 인코더 구성 사례
시장요구와 로봇사업 추진 방향
제조용 로봇이나 협동로봇이나 선진국과의 경쟁은 갈수록 격화될 것이 자명해 보인다. 여기에 굳이 선진국이 아니더라도 최소한 제조용 로봇의 양산수량에 있어서만큼은 중국이 이미 세계 최고가 아닐까 추측한다. 시장이 있어야 기술도 발전한다. 최근 신송이나 Effort 등을 필두로 한 중국 로봇기업들의 도전은 무모하리만큼 도전적이다.
국내는 극히 일부 기업만이 제조 및 협동로봇 사업을 실행중인 것이 현실이다. 다관절 제조로봇 분야 1개사, 협동로봇 분야는 모두 신생기업으로 3~4개사로 이게 전부이다. 그나마도 기업의 규모에 따라 자사 또는 계열사를 갖는 기업이 자체 수요를 기반으로 사업화에 뛰어든 배경이 있어, 여전히 국제 경쟁력 면에서는 아직 길이 멀다고 생각한다.
1. 국산화와 서비스 경쟁력
미리 언급하고 싶은 바는 기술개발 국산화가 곧 제품 국산화를 의미하지 않는다는 점이다. 예를 들면 국내 유일의 제조로봇 양산기업도 모터, 인코더 및 감속기는 도입품을 사용한다. 전장 내부의 로봇제어기와 드라이브는 내제화하는 방식으로 처리한다. 협동로봇을 양산한다고 하는 기업들도 로봇제어기 하드웨어는 산업용 PC 기반에 일정 부분 소프트웨어 체계는 도입할 수밖에 없고, 중공형 모터나 인코더 경우에 따라서는 드라이브까지 도입부품에 의존할 수밖에 없는 현실적인 문제가 있어서 과연 이게 장기적으로 가격 경쟁력이 유지될지 생각하게 한다.
오늘 현재도 제조로봇 대부분의 소비층은 대량생산을 전제로 하는 대기업이거나 관련 기업일 수밖에 없었다. 중소기업이나 영세기업은 제조용 로봇을 운용하고 싶어도 인적 물적 자원의 제약이 있어 활용이 어렵고, 더욱이 사후관리 능력이 담보되지 않는 한 현장 적용은 불가하다.
결과적으로 경쟁력 약화로 내몰릴 수밖에 없어진다. 협동로봇은 당초 제조용 로봇을 중소 또는 영세기업 현장에서 소량 다품종 생산에 활용 가능하도록 하자는 취지에서 개발이 시작되었으나, 정작 사용처는 대기업 또는 중견기업 현장으로 몰릴 뿐이고 중소기업이나 영세기업 현장에서의 활용은 찾아보기 어렵다. 그 사유도 가격과 서비스기술지원과 직결된다고 생각한다.
2. 로봇사업 추진 방향
이런 배경에서 우리는 Bottom-up 방식으로 로봇사업을 추진해 왔다. 기본적으로 전기전장 및 소프트웨어 국산화를 목표로 했기 때문에 드라이브와 모터에 이어 인코더를 개발했고, 이를 적용해줄 수요처를 발굴하는 과정에서 로봇 및 모션제어기까지 확대했다. 그 사이 다양한 형태의 프로젝트를 진행하는 과정이 로봇사업으로 이어졌다.
사용자를 중심으로 살펴보면, 표준품 대량생산이 목표인 대기업 현장에서 로봇 가격은 둘째 문제이고 우선 제품 양산을 적기에 효율적으로 지원할 수 있는 고성능화한 로봇제품이 우선이다. 그러나 중소, 영세기업 현장은 가격이 우선이고, 무엇보다 중요한 점은 누가 운용과 서비스를 책임져 줄 것인가에 있으며 로봇 성능은 그다음 차례의 문제이다. 이런 관점에서 최근의 국내외 로봇기업의 움직임은 로봇의 급격한 가격 인하를 촉진할 것으로 예상한다.
이와 반대로 국내 인건비는 국가 경제수준에 맞춰 상승이 예상되고, 작업 현장은 국제 수준에 걸맞게 클린화도 해야 하고 자동화를 통한 품질안전성 확보도 도모해야 한다.
협동로봇에 대해서는 지난 2월 8일 한국로봇산업진흥원에서 주관한 협동로봇개발 및 보급활성화를 위한 얼라이언스 발족에 있어서 핵심 구동부품의 대표기업으로 하이젠모터는 공식 참여한 바 있다. 병행해서 협동로봇모듈 상용화 기술개발을 위한 다년간에 걸친 정부지원 프로젝트의 주도적인 수행을 통해 관련 분야의 원천기술과 제품개발능력을 확충해 왔고, 올 해부터는 그 성과물에 기반한 구동모듈제품을 보급할 예정이다.
협동로봇 모듈은 All in One 구성을 갖는 구동모듈제품과 토크센서를 내장하고 구동용 제어기를 분리형으로 구성한 모델이 있다. 그림 21에는 All in one 모듈과 지난 7월부터 새로이 시작하는 협동로봇모듈 기술개발을 위한 워크숍 행사모습을 보였다.

▲ 그림 21 All-in-one 협동로봇 모듈(위)과 관련기술 워크숍
과거부터 현재까지 로봇사업 추진을 위한 이력을 정리한 바를 그림 22에 나타냈다.
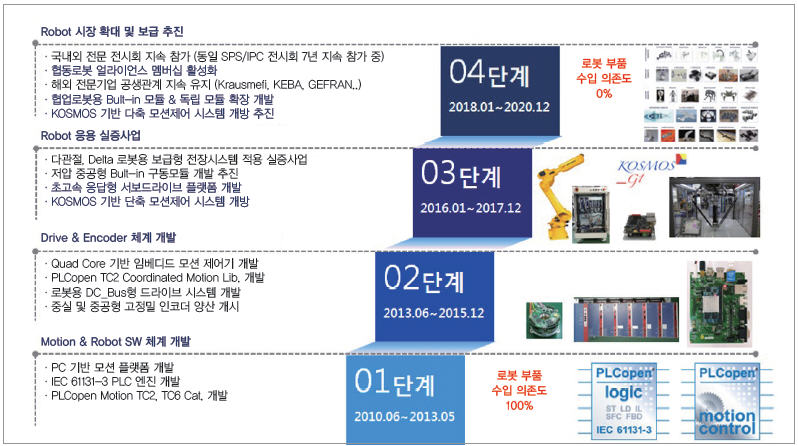
▲ 그림 22 로봇사업 추진 로드맵
맺음말
하이젠모터는 2008년 4월 설립 이래 현재까지 자동화 제어시스템의 4대 핵심요소인 모션제어기, 드라이브, 서보모터 및 인코더 분야의 기술개발에 역량을 집중하여 꾸준히 확대 육성하고 있다. 특히 정부지원의 기술개발사업을 기반으로 장기간 일관성을 갖고 기술개발을 추진해 왔으며, 더불어 국내외 유수의 기관과 분야별 관심 주제에 대한 공동기술개발사업을 진행해 왔다.

▲ 그림 23 하이젠모터 본사 창원공장(왼쪽)과 중성전기(유) 청도공장
관련된 산업 분야에서의 어려운 경기여건과 선후진국 사이에서 해결해야 할 과제도 녹녹하진 않은 것이 엄연한 현실이다. 앞만 보고 달려온 사이에 앞서 보이는 제조강국은 불과 서넛이고 거의 모든 후발 국가의 추격에 잠시 주춤거리는 것이 오늘의 모습이 아닌가 생각한다.
제조 경쟁력 약화를 우려하는 목소리가 점차 커지는데 주변을 보면 해결을 위한 방법도 가까이 있다고 생각한다.
제조용 또는 협동로봇이나 간에 중국도 로봇을 급속히 보급해서 자동화를 통한 제조경쟁력을 키운다는데 “우리는 어떻게 하지?”라는 질문에 대한 답을 찾아야 한다.
제조 경쟁력과 서비스 경쟁력을 독일이나 일본 수준으로 끌어올리는 길에 다른 로봇은 몰라도 제조로봇과 협동로봇이 중요한 역할을 담당할 것이라는 점에 의심은 없다. 모든 일이 그렇듯이 아는 것이 가장 쉬운 것이고, 모르는 것은 모두 어렵다는 표현을 달고 산다. 아직도 갈고 닦아서 기술이 아니라 상품이 되는 날까지 또 걸음을 옮겨야 한다. 선진국들이 모든 분야에서 그렇게 해 왔다.











































