
[전력반도체] 절연형 고주파수 푸쉬-풀 DC/DC 컨버터 설계 - 1
[전력반도체] 절연형 고주파수 푸쉬-풀 DC/DC 컨버터 설계 - 2
통신 시스템, 의료 장비, 분산 전원장치 등의 애플리케이션에서 저잡음 트랜스포머 드라이버로서 고정적 50% 듀티 사이클을 사용한 푸쉬-풀 DC/DC 컨버터가 흔히 사용된다. 이 방법은 간단하기는 하지만 전압 레귤레이션을 하지 못하므로 LDO 포스트 레귤레이터를 필요로 한다. 하지만 이 때문에 LDO의 전력 손실과 높은 온도 상승 및 큰 트랜스포머를 요하는 문제가 생긴다. 이 글에서는 LT3999 모노리딕 DC/DC 푸쉬-풀 드라이버를 사용해 상기 문제를 해결할 두 가지 방식의 디자인 설계법을 단계적으로 설명한다.
통신 시스템, 의료 장비, 분산 전원장치 등의 애플리케이션에는 저잡음 트랜스포머 드라이버로서 고정적 50% 듀티 사이클을 사용한 푸쉬-풀 DC/DC 컨버터가 흔히 사용된다. 이 방법은 간단하기는 하지만 전압 레귤레이션을 하지 못하므로 LDO(low dropout) 포스트 레귤레이터를 필요로 한다. 그런데 바로 이러한 조합이 다음과 같은 문제를 야기할 수 있다.
첫째, 드라이버의 입력 전압이 심하게 변동적이면 고정적인 50% 듀티 사이클 때문에 LDO 상에서 차이 전압이 상승함으로써 LDO에서 상당한 전력 손실과 높은 온도 상승을 일으킨다.
둘째, 낮은 스위칭 주파수 때문에 상대적으로 부피가 큰 트랜스포머를 필요로 함으로써 컨버터 공간의 30~50%를 차지할 수 있다.
LT3999 모노리딕 DC/DC 푸쉬-풀 드라이버는 두 가지 기능을 사용해서 이와 같은 문제들을 해결한다. 바로 듀티 사이클 제어와 고주파수 동작이다.
• 듀티 사이클 제어는 넓은 폭의 VIN 변동에 대해서 보정을 가능하게 하므로(고정 듀티 사이클 트랜스포머 드라이버는 할 수 없는 것) 넓은 입력 범위일 때 LDO 손실을 대폭적으로 감소시킨다.
• 높은 스위칭 주파수(최대 1MHz)는 더 소형의 트랜스포머를 사용할 수 있으며 출력 리플을 낮춘다.
LT3999는 이러한 두 가지 기능에 높은 36V 입력 전압과 1A 입력 전류 용량을 결합함으로써 유연성 뛰어난 고전력 저잡음 푸쉬-풀 컨버터 IC로서 기능한다.
이 글에서는 두 가지 방식의 디자인을 설계하는 것을 단계적으로 설명한다. 하나는 입력 범위가 넓은 푸쉬-풀 DC/DC 컨버터이고, 다른 하나는 고정적 입력 전압의 소형화된 고주파수 트랜스포머 드라이버이다.
입력 범위가 넓은 푸쉬-풀 DC/DC 컨버터 디자인
그림 1(b)의 플로우차트에는 푸쉬-풀 컨버터를 어떻게 8단계에 걸쳐서 설계하는지를 나타냈다. 이 단계들을 시행함으로써 그림 1(a)에서 보는 것과 같이 LT3999를 사용한 10V~15V 입력, ±12V 출력, 200mA 1MHz 푸쉬-풀 컨버터를 설계할 수 있다.
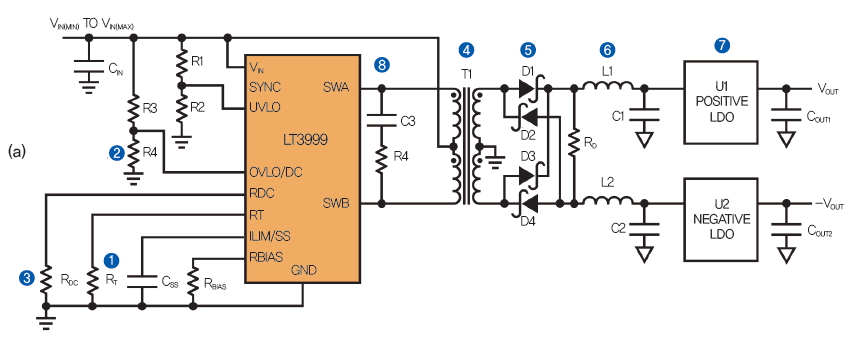
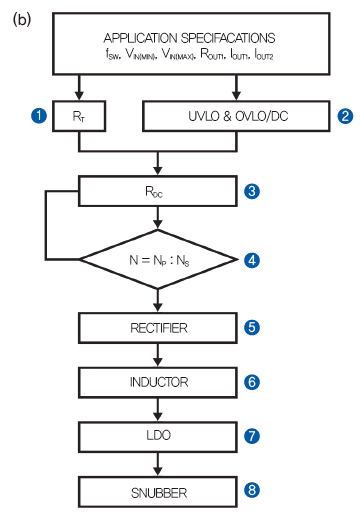
그림 1. (a) 넓은 입력 범위와 듀티 사이클 제어를 사용한 LT3999 기반 푸쉬-풀 DC/DC 컨버터, (b) 푸쉬-풀 컨버터를 설계하기 위한 8단계 순서도
1단계 : 스위칭 주파수 설정
가장 먼저, RT를 사용해서 스위칭 주파수를 설정한다. 표 1은 LT3999 데이터 시트에 나온 추천하는 1% 표준수치를 보여주며 참고해서 값을 선택할 수 있다.
RT = 12.1k이면, fSW = 1MHz로 설정한다.
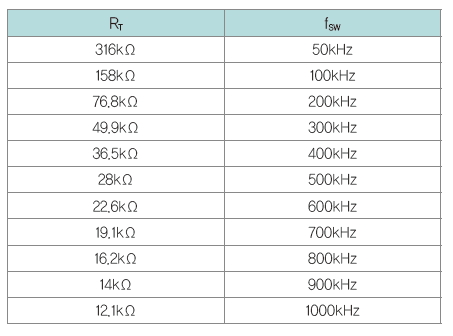
표 1. 리니어가 추천하는 1% 표준수치
2단계 : 입력 전압 범위 설정
UVLO(undervoltage lockout)와 OVLO/DC (overvoltage lockout/duty cycle) 핀을 사용해서 입력 전압 범위를 설정할 수 있다.
2저항 또는 3저항 방법을 사용할 수 있다. 그림 2(a)의 2저항 방법은 UVLO와 OVLO/DC에 대해서 각각 아래의 식 1과 2를 사용해서 RB를 계산할 수 있다. 낮은 손실을 위해서 RA = 1MΩ이라고 하자.
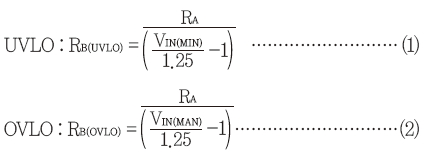
그림 2(b)의 3저항 방법을 위해서는, UVLO와 OVLO/DC에 대해서 각각 식 3과 4를 사용해서 RA1 및 RB를 계산할 수 있다. RA2는 1MΩ 부근에서 선택할 수 있다.
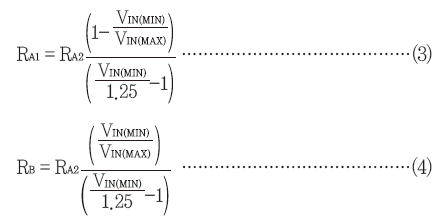
그림 1(a)에 2저항 방법을 사용하면 다음과 같다.
VIN(MIN) = 10V, RA = 1M, RB = 143k
VIN(MAX) = 15.5V, RA = 1M, RB = 86.6k
3단계 : 최대 듀티 사이클 설정
최대 듀티 사이클(DCMAX)은 식 5에서 보는 것과 같이 스위칭 피리어드(TS = 1/fSW)와, 2개 전력 스위치 사이의 비중첩 시간(TD(MIN))에 의해서 결정된다. 2저항 방법을 위해서는 식 6을 사용해서 RDC를 계산할 수 있다. 3저항 방법을 위해서는 식 6에서 RA = RA1 + RA2로 치환한다.
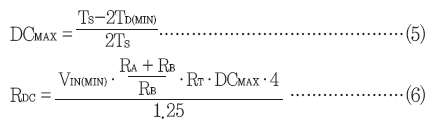
그림 1(a)에서는 TS = 1µs, TD(MIN) = 70ns(데이터 시트 상의 정격 수치), VIN(MIN) = 10V, RA = 1M, RB = 143k이다. 그러므로 식 5와 6을 계산하면 DCMAX = 0.43, RDC = 13.3k이다.
4단계 : 트랜스포머 선택
트랜스포머 권선 비율은 식 7과 같이 나타낼 수 있다.

VSW는 내부 스위치의 스위치 포화 전압이며, VF는 정류기 다이오드의 포워드 전압이다. 또 VLDO1과 VLDO2는 양 및 음 LDO의 드롭아웃 전압이다. VSW = 0.4V, VF = 0.7V, VLDO1 = VLDO2 = 0.8V이면 대체적으로 적합하다. 만약에 계산된 권선 비율에 정확하게 맞는 트랜스포머를 구입할 수 없을 때는 가장 근접한 것을 선택하고 그에 따라서 식 7을 사용해서 DCMAX를 계산한다. 그런 다음 방금 구한 DCMAX를 사용해서 식 6으로 RDC를 계산한다.
그림 1(a) 디자인은 VOUT = -VOUT2 = 12V이고 VIN(MIN) = 10V이므로 DCMAX = 0.43을 위해서는 Wurth의 750314781 (N = 2)을 선택하면 적당하다.
5단계 : 정류기 설계
정류기 브리지 상의 피크 전압은 트랜스포머 이차 측 전압(VSEC)과 링잉 전압 스파이크의 합으로 이루어진다. VSEC은 식 8을 사용해서 계산할 수 있다. 하지만 링잉 전압 스파이크는 좀 더 계산하기 어려운데, 이유는 루프 저항, 트랜스포머 누설 인덕턴스, 정류기의 접합부 커패시턴스에 따라서 달라지기 때문이다. 대략적인 원칙은, 정류기 전압 정격(VREC)이 트랜스포머 권선 비율에 최대 입력 전압을 곱한 것의 최소한 1.5배가 되어야 한다는 것이다.
2개의 이차 권선이 정류기 브리지로 연결되므로 2의 계수가 필요하다. 그러므로 정류기 전압 정격을 구하기 위한 공식은 다음과 같다.

정류기의 전류 정격(IREC)은 부하 전류보다 높아야 한다.
VIN(MAX) = 15.5V, N = 2, VREC ≥ 93V, IREC ≥ 200mA이면 Central의 CMSH1-200HE(200V, 1A)가 이러한 요건들을 충족한다.
6단계 : 인덕터 선택
최소 인덕터 값(LMIN)은 식 9에서와 같이 내부 스위치의 피크 전류 한계에 의해서 결정된다.
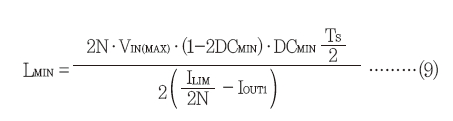
인덕턴스가 높을수록 더 우수한 레귤레이션과 더 낮은 전압 리플을 달성할 수 있다. 하지만 그만큼 더 크기가 큰 소자를 필요로 한다. 출력 잡음과 솔루션 크기를 둘 다 고려해서 적정한 인덕터 값을 선택할 수 있을 것이다.
VIN(MAX) = 15.5V, DCMIN = 0.28, TS = 1µs, N = 2, ILIM = 1A, IOUT1 = IOUT2 = 200mA, LMIN = 38.3µH이면 Coilcraft의 XFL3012-393MEC(39.3µH)가 불필요한 크기를 늘리지 않으면서 이러한 요건들을 충족한다.
7단계 : LDO 리니어 레귤레이터 선택
LDO가 최대 전압이 되는 때는 최대 입력 전압이면서 무부하일 때이다. 이때는 VSEC가 VIN(MAX)·N과 동일하다. LDO의 전류 정격은 부하 전류보다 높아야 한다.
VIN(MAX) = 15.5V이고 N = 2이면 LDO의 전압 정격은 31V 및 -31V가 되어야 한다. 각기 LT3065(45V, 500mA)와 LT3090(-36V, 400mA)을 사용하면 적당하다.
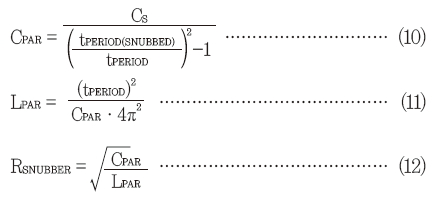
8단계 : 스너버 추가
RC 스너버(그림 1의 CS와 RS)를 설계하기 위해서 권장되는 방법은 다음과 같다. 먼저, 스너버 없이 스위치가 턴오프 할 때 LT3999의 SWA 및 SWB 핀 상의 링잉 피리어드를 측정하고, 그런 다음에 100pF 정도부터 시작해서 링잉 피리어드가 1.5~2배까지 길어지도록 커패시턴스를 추가한다.
피리어드를 변화시키는 것이 기생 커패시턴스(CPAR) 값을 결정하고, 이에 따라서 초도 피리어드로부터 기생 인덕턴스(LPAR)를 계산할 수 있다. 마찬가지로 데이터 시트 상의 스위치 커패시턴스 및 트랜스포머 누설 인덕턴스 값을 사용해서 초도 값들을 계산할 수 있다.
드레인 노드 커패시턴스와 인덕턴스 값을 구했으면, 전력을 소산시키고 링잉을 확실하게 약화시킬 수 있도록 스너버 커패시턴스로 직렬 저항을 추가한다. 피리어드[tPERIOD와 tPERIOD(SNUBBED)]와 스너버 커패시턴스(CS)를 사용해서 적정한 직렬 저항을 도출하기 위한 공식은 다음과 같다. LT3748 데이터 시트에서 이에 관한 좀더 자세한 내용을 볼 수 있다.
더슨 황 _ 리니어 테크놀로지