
[헬로티]
옛날부터 해온 것처럼 금속 등 딱딱한 소재를 사용해 로봇을 만드는 것과 최근 ‘소프트 로보틱스’로서 주목받고 있듯이 인간처럼 부드럽게 로봇을 만드는 것은 어느 쪽이 정답일까? 최근 로보틱스 분야에서는 생물과 같이 부드러운 로봇을 취급하는 ‘소프트 로보틱스’가 세계적으로 주목을 받고 있다. 예를 들면, 저출산 고령화 사회로 급격히 진행되고 있는 가운데 로봇은 의료, 간병․복지, 건강관리 등 여러 분야에 다양한 형태로 적용되고 있으며, 기존의 산업용 로봇과 달리 사람과 접촉했을 때 서로 간에 손상이 적도록 유연한 관절과 피부가 필요하다.
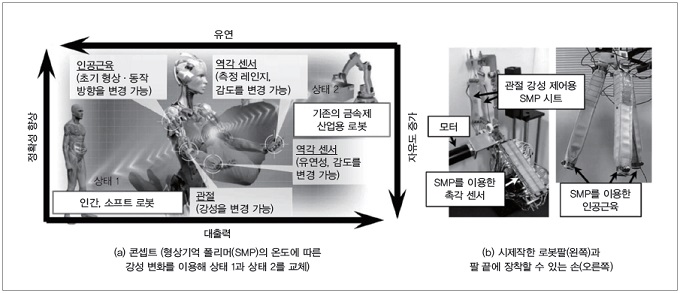
그림 1. SMP의 온도에 따른 강성 변화를 이용한 로봇의 개발

그러나 로봇을 부드럽게 하면 부딪혔을 때의 손상은 작지만, ‘부드러움이 강함을 이긴다’고 하는 경우뿐만이 아니라, 움직임의 정도를 높이는 것이 어려워진다. 예를 들면 부드러운 피부라면 대상물이 그 표면에서 어떤 자세를 취하고 있는지 정확하게 파악하기 어렵고, 피부에 탑재된 촉각 센서 등의 측정 정도에도 영향을 미친다. 또한, 단순히 부드럽게 하는 것만으로는 쉽게 손상될 우려도 있고, 사람과 같이 연조직인 피부가 계속 재생되는 구성도 아니므로 힘들고 번거로운 메인티넌스․교환이 빈번하게 필요하다.
한편, 이전부터 일반적으로 해오던 모터와 기어의 조합으로 큰 힘을 내려고 하면, 필요가 없을 때에도 관절이 딱딱해져 버린다. 또한, 임피던스를 피드백 제어하는 경우, 충돌 등 빠른 현상에 대응할 수 없다. 더욱이 로봇을 공장뿐만 아니라 폭넓은 환경에서 사용하는 경우에는 다양한 외계 정보의 측정도 필요한데, 기존의 센서 레인지․감도는 센서 재료에 의해 정해지고 있어 센서 제작 후에 변경할 수 없다.
이상과 같이 앞의 질문에 대한 현재의 정답은 사용 상황에 따라 다를 것이다. 즉, 공장과 공장 이외의 병원, 요양시설, 일상생활 등에서 사용하는 로봇에는 요구되는 사양이 다르며, 다른 로봇 개발이 필요했다.
이러한 배경에서 필자 등은 지금까지 온도에 따라 재료의 유연성이 변화하는 형상기억 폴리머(SMP)를 이용해 유연성과 감도가 가변하는 관절, 소프트 액추에이터(인공근육), 피부(촉각 센서), 역각 센서, 나아가서는 그들을 조합한 로봇팔을 개발해 왔다(그림 1). SMP에 전열선을 매립, 온도 제어하고 강성․감도를 가변으로 함으로써 인간의 유연성․다자유도와 공장에서 기존 사용되어 온 금속제 로봇의 정확성․고강성을 자유자재로 전환하는 것이 가능하게 된다. 이 글에서는 그 응용 사례를 소개한다.
형상기억 폴리머의 응용
1. 형상기억 폴리머란 무엇인가
SMP는 성형가공 후에 힘을 가해 변형해도 유리 전이온도(Tg) 이상으로 가열하면 원래의 형상으로 회복된다. 또한, SMP는 실온 부근에 설정 가능한 Tg 이상으로 가열하면 탄성률이 크게 변화해 약 100~1000분의 1이 된다. 그렇기 때문에 Tg 이상에서 고무와 같이 부드럽게 큰 변형을 시킬 수 있다. 그 상태에서 Tg 이하로 하면, 변형된 임의의 형상을 유지한 채 고무볼을 액체 질소에 넣는 이과실험과 같이 유리처럼 딱딱하게 잘 변형되지 않게 된다(형상고정성). 그 후 Tg 이상으로 가열하면, 재료는 유연성을 되찾고 본래의 탄성력에 의해 원래의 형상으로 회복된다(형상회복성).
더욱이 동종의 형상기억 재료로 널리 보급되고 있는 형상기억 합금(SMA)과 SMP의 차이는 ①가볍다, ②복잡한 형상으로 가공하기 쉽다, ③저온에서 딱딱하고 가열하면 부드럽다(SMA는 반대), ④형상 회복률이 높다는 것 등을 들 수 있다.
또한, SMP는 Tg를 경계로 수증기 투과성, 에너지 산일 특성, 굴절률, 유전율 등도 변화하므로 산업 분야, 의료 분야, 우주 개발 분야 등 다양한 분야에 대한 응용이 검토되고 있으며, 온도에 따라 투습도를 변화시키는 의료품 등의 시판품에도 사용되고 있다. 또한, SMP와 3D 프린터를 조합해 3D 프린터로 조형한 것이, 외부의 자극에 반응해 시간이 지나면 최종적인 형상이 되는(예를 들면, 평평한 시트에서 종이비행기가 접힌 형상으로) 4D 프린트 기술도 개발이 진행되고 있다.
실용화된 SMP에는 폴리우레탄, 폴리노보넨, 트랜스폴리이소프렌, 스티렌-부타디엔공중합체 등 조성과 기계적 특성, 형상 회복 온도가 다른 여러 종류가 존재한다. 필자 등은 형상 회복 온도의 설정 온도 범위가 넓고 기계적 특성도 좋으며, 가장 많이 실용되고 있는 SMP테크놀로지스제의 폴리우레탄계 SMP를 이용하고 있다. 폴리우레탄계 SMP의 역학적 특성에 대해서는 토후시(戸伏) 등이 자세하게 조사했으므로, 자세한 내용은 문헌 ‘형상기억 재료와 그 응용’을 참조하기 바란다.
또한, 고분자 재료가 가열에 의해 수축하는 현상을 이용한 열수축 튜브나 필름이 널리 보급되어 있는데, 앞에서 말한 재료를 입수하기 어렵다면 용도에 따라서는 이들을 이용하는 것도 생각할 수 있다. 한편, 앞에서 말한 4D 프린트에 관한 문헌 ‘Active Origami by 4D Printing’에서는 시판의 3D 프린터용 필라멘트가 사용되고 있다.
SMP를 로봇에 응용한 연구는 강성 변화가 가능한 관절이나 그리퍼에 응용한 것을 볼 수 있는데, 필자 등과 같이 로봇 전신의 각 요소로 확장한 연구는 세계적으로도 찾아볼 수 없다. 한편, SMP를 사용하는 것 이외에도 관절 강성을 제어하는 기구로서는 인공근육이나 비선형 스프링의 길항 구동형과 전기 점성 유체, 자성 유체를 이용한 것 등 옛날부터 여러 가지 방법이 제안되어 왔다. 또한, 재밍(jamming) 전이 현상, 저융점 금속, 공기압 팽창 구조 등을 이용해 표면 등의 구조가 연화하거나, 형상 변화하거나 하는 로봇도 제안되고 있다.
2. 형상기억 폴리머의 응용에 있어서
이러한 온도에 따라 강성이 변화해 형상고정성, 형상회복성을 갖는 SMP를 로봇에 응용하는데 있어서 이하의 점을 고려했다.
(1) SMP를 동력원으로서가 아니라, 수동 요소로서 사용 : 앞에서 말한 것과 같이 SMA에 비해 SMP는 형상회복력은 작지만(1/10), 형상 회복 변형이 매우 크다(몇 100%). 그렇기 때문에 동력원(액추에이터)는 별도로 설치해 사용한다.
(2) ON/OFF와 같이 두 상태를 전환 : SMP는 크리프나 응력 완화 등의 영향이 크다. 이 영향은 특히 유리 전이 영역에서 강성이 연속적으로 변화하는 특성을 이용하려고 하는 경우, SMP의 취급을 어렵게 한다. 그렇기 때문에 유리 전이 영역 이외의 영역에서 강성이 불연속인 두 가지 상태로 크게 전환되는 특성을 이용한다.
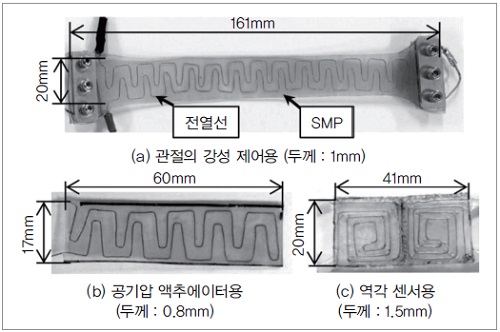
그림 2. 전열선 매립형 SMP 시트
3. 전열선 매립형 형상기억 폴리머 시트
SMA에서는 가열 시의 형상회복력을 이용한 액추에이터가 옛날부터 연구․개발되어 왔는데, 가열이 필요 없는 초탄성의 변형회복성을 이용한 응용(휴대전화의 안테나 심선, 의료용 가이드 와이어 등)이 널리 실용화되어 왔다. 즉, 쉬운 가열이나 빠른 응답성은 로봇에 대한 응용, 실용화에 있어서 매우 중요한 조건이다. 필자 등의 연구 초기 단계에서 SMP를 로봇의 관절 강성 제어에 응용했을 때(자세한 사항은 나중에 설명함), 튜브 상의 SMP 내부에 온풍을 통과시켜 가열했다. 그러나 온풍을 이용하면 가열 효율이 나쁘고, 가열 시간이 길어졌다. 더욱이 온풍을 보내기 위해서는 송풍장치, 히터가 필요해 장비가 대형화된다. 특히 튜브의 내경을 좁게 하면, 압력 손실은 더욱 커지고 탑재한 로봇의 자립화를 위한 소형화의 장벽이 된다.
그렇기 때문에 온풍을 대신하는 가열 방법으로서 줄열을 이용하는 방법을 검토해 왔다. 필자 등이 제작한 전열선 매립형 SMP 시트의 예를 그림 2에 나타냈다. 용도에 따라 사이즈나 전열선 형상을 바꾸고 있다. 사용한 SMP는 2액 경화 타입(MP4510)으로, Tg는 45℃이다(탄성률 : 1350MPa(Tg 이하), 4.5MPa(Tg 이상)).
먼저 2액을 혼합해 가열함으로써 경화하고, 그 형상을 기억시켰다. 그 후 가열 프레스해 시트 형상을 재기억시켰다. 또한, 온도를 제어하기 위해 2장의 시트 사이에 전열선(니크롬선)을 끼우고, 다시 가열 프레스해 2장의 SMP를 접착시키고 SMP 자체에 그 형상을 재기억시켰다. 프레스 가공함으로써 두께를 얇고 균일하게 SMP 시트 내부의 기포 양을 줄일 수 있고, 빠르게 가열할 수 있었다. 또한, 온도 제어장치를 이용함으로써 온도를 일정하게 유지할 수 있었다. 한편, 전열선을 매립하는 것으로 인한 기계적 특성(시트의 굽힘이나 인장변형)에 미치는 영향은 적었다.
로봇팔에 대한 응용 예
여기서부터는 온도에 따라 강성이 변화하고, 형상고정성, 형상회복성을 갖는 SMP를 필자 등이 로봇에 응용한 예를 소개한다.
1. 관절 강성 제어
그림 1 (b), 그림 3에 나타냈듯이 SMP를 이용해 로봇팔 등의 관절 강성 제어, 자세 유지를 검토했다. SMP는 인간의 근육과 마찬가지로 와이어를 거쳐 팔에 길항해 배치시켰다. 즉, 이동 시에는 가열해 고무 상태로 저강성으로 한다. 이것은 인간이 관절 주위의 굴근․신근을 동시에 이완시켜 외부로부터 자유롭게 움직일 수 있게 된 상태에 대응한다.
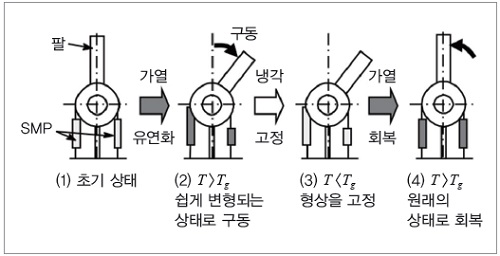
그림 3. SMP를 이용한 로봇팔의 관절 강성 제어 (동작 순서)
또한, 하중을 유지하는 경우 등 자세 유지 시에는 냉각해 유리 상태로 고강성을 유지한다. 이것은 예를 들면 인간이 물건을 파지했을 때, 대상물의 무게에 따라 관절의 경도를 바꾸는 것에 대응한다. 지금까지 시제작품을 이용한 평가 실험을 통해 이 콘셉트의 유효성을 나타낼 수 있었다. SMP을 로봇의 자세 유지에 이용함으로써 연속적으로 변화하는 임의의 위치에서 인공근육을 길항시키는 보다 강한 유지력으로, 에너지를 공급하지 않고 자세를 유지할 수 있어 자원 절약으로 이어진다.
2. 소프트 액추에이터
소프트 액추에이터는 인공근육이라고도 불리며, 소재 자체가 부드럽기 때문에 액추에이터로서 대상물에 손상을 줄 위험이 적다. 이번 ‘액티브 소프트 머티리얼의 로보틱스․메카트로닉스 응용을 위해’에서도 흥미로운 액추에이터의 최신 연구가 많이 소개되어 있으므로 참조하기 바란다. 필자 등은 SMP를 실장한 소프트 액추에이터(McKibben형 액추에이터, 만곡형 공기압 고무 인공근육, 고분자 액추에이터)를 개발해 왔다.
예를 들면 고무에 압축 공기를 주입해 동력을 얻는 공기압 액추에이터는 경량․유연․고출력 등의 이점으로부터 웨어러블한 파워 어시스트 장치에 응용이 검토되고 있다. 그중 하나인 McKibben형 액추에이터는 그물 모양의 섬유 슬리브로 덮인 고무 튜브의 내부에 압축 공기를 공급하면 길이 방향으로 수축하고, 배기하면 원래의 길이로 되돌아가는 공기압 액추에이터이다. 필자 등은 McKibben형 액추에이터 표면에 SMP를 도포한 시제작품을 제작, SMP를 유리 상태로 함으로써 압축 공기를 공급하지 않고도 하중을 부하할 수 있다는 것을 확인했다.
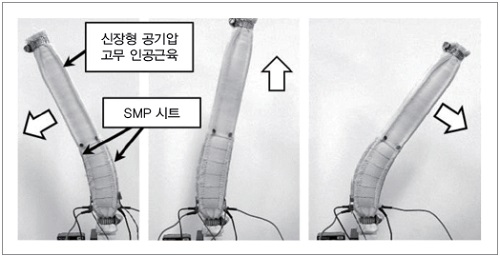
그림 4. SMP를 이용한 공기압 고무 인공근육
신장형 인공근육은 압축 공기 공급 시, 구속된 쪽으로 만곡된다. SMP로 구속함으로써 온도에 따라 방향을 변경할 수 있게 된다.
또한, 신장형 공기압 고무 인공근육은 고무 튜브 주위를 폴리에스테르 섬유제의 주름상자나 직조 고무로 덮은 것이다. 고무 튜브 안을 가압했을 때 튜브 반경 방향의 팽창이 억제되고 축 방향으로만 신장한다. 이 신장형 공기압 고무 인공근육은 일부를 섬유 강화해 만곡 동작을 하는 것을 이용한 파워 어시스트 글로브의 개발 등이 이루어지고 있다. 그러나 신장 구속 부재를 한 번 붙이면, 초기 형상, 굴곡하는 방향, 곡률 등을 변경할 수 없다. 그래서 필자 등은 SMP 시트를 신장 구속 부재에 이용한 만곡형 공기압 고무 인공근육을 개발, 동작 특성을 평가했다(그림 4). 예를 들면 전열선을 매립한 SMP 시트를 공기압 고무 인공근육에 설치, 만곡 동작의 양과 초기 형상 등을 온도에 따라 변경할 수 있다는 것을 보였다.
이 인공근육을 그림 1 (b)과 같이 응용한 핸드는 초기 상태에서부터 손을 개폐하는 양방향으로 동작이 가능하다. 또한, 소형화한 SMP 시트를 여러 장 붙임으로써 코끼리의 코처럼 공기압 고무 인공근육을 다자유도화해 용장성을 갖게 할 수 있다. 이것에 의해 복잡한 물체 형상을 따른 동작이나 장애물 회피에 응용할 수 있는 액추에이터로서 이용하는 것을 생각할 수 있다.한편, Ionic polymer-metal composite(IPMC) 액추에이터는 귀금속(금)과 불소계 이온 교환수지(Nafion)의 복합체이다. 화학적으로 안정, 수중에서 낮은 전압에 의해 굴곡되는 등의 특징을 갖는다. 필자 등은 형상기억 재료로서 이용 가능한 Nafion의 특성을 이용해 IPMC 액추에이터의 정지 상태나 동작 범위를 변경할 수 있다는 것을 나타냈다.
3. 역각 센서
최근 로봇은 공장 등의 제한된 장소뿐만 아니라, 간병이나 복지 현장 등에서도 사용될 기회가 많아졌다. 이러한 현장에서는 상황에 따라 여러 가지 정보를 취득할 필요가 있다. 그러나 기존의 역각 센서는 센서 재료에 가해진 변형량을 변형 게이지 등으로 판독하는 방법으로, 센서 재료에 따라 측정이 가능한 레인지․감도가 정해져 있어 변경이 불가능하다. 그래서 필자 등은 센서 재료로 SMP를 이용함으로써 측정 레인지와 감도를 변경할 수 있는 역각 센서를 개발해 왔다(그림 5).
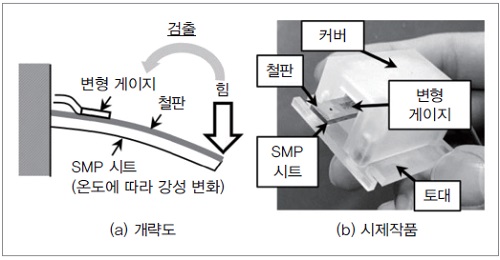
그림 5. SMP를 이용한 역각 센서
SMP는 온도에 따라 강성이 변화하므로 같은 힘을 가해도 온도에 따라 변형량이 다르다. 그렇기 때문에 센서를 제작 후, 하중의 측정 레인지나 감도를 바꿀 수 있다. 지금까지의 연구에서는 외팔보 모양으로 고정한 SMP 시트에 변형 게이지를 붙인 센서를 시제작해 이 콘셉트의 유효성을 나타내 왔다. 이때 얇은 철판을 붙임으로써 변형 게이지와 SMP 시트의 탄성률 차이의 영향을 줄일 수 있었다. 현재는 그림 5 (b)와 같이 센서의 소형화를 검토하고 있다.
4. 촉각 센서
로봇이 사람과 접촉하거나 손동작을 정교하게 하기 위해 촉각 센서는 여러 가지 분야에서 응용이 확대되고 있다. 예를 들면, 간병용 로봇이 안아 올리는 작업을 할 때는 촉각 센서에 의해 팔 표면의 하중 분포를 검출함으로써 접촉 영역 힘의 총합과 압력 중심을 산출해 팔을 제어한다.
촉각 센서는 분포시킨 여러 개의 감압소자 표면에 탄성체 커버를 붙이는 것으로 구성되어 있다. 이 탄성체에는 대상물과의 접촉 시 충격을 줄이기 위해 유연하고 탄력이 있으며, 변형성도 풍부한 성질이 요구된다.
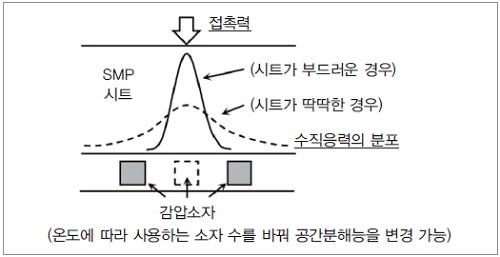
그림 6. SMP를 이용한 촉각 센서 (개략도)
한편, 가압력에 대한 감압소자 상부의 수직응력의 분포는 탄성체가 딱딱한 경우라면 넓어지고, 탄성체가 부드러운 경우라면 좁아진다. 기존의 촉각 센서에는 유연성이 일정한 탄성체가 이용되고, 센서 재료의 재질․사이즈에 따라 측정 레인지나 감도는 정해진다. 그렇기 때문에 기존에는 측정 레인지나 감도를 바꾸어 측정을 하는 경우, 센서의 교환이 필요했다. 그래서 필자 등은 SMP를 이용함으로써 교환하지 않고 센서의 측정 레인지나 감도를 변경할 수 있는 촉각 센서를 개발해 왔다(그림 1 (b), 그림 6).
제안하는 촉각 센서는 표면의 커버를 SMP로 구성함으로써 온도에 따라 유연성을 변경할 수 있다. 한편, 표면에 힘이 가해졌을 때의 응력 분포는 표면 커버의 유연성에 의존하므로 촉각 센서의 공간분해능을 온도에 따라 변경할 수 있다.
또한, 인간과 달리 아르마딜로나 공벌레 등 위험을 감지해 특징적인 형태가 되는 생물이 많은데, 마찬가지로 외계의 위험을 감지해 표면의 강성을 바꾸고 자신을 보호하는 로봇을 구성할 수 있다. 한편, 생물의 피부는 유연성을 살려 에지 형상 등 대상물을 모방한다. SMP를 이용함으로써 그 모방한 상태로 표면을 딱딱하게 만드는 등 대상물에 따라 파지․센싱하기 쉬운 형상을 구성할 수 있다.
지금까지 SMP를 사용한 촉각 센서를 제작해 Tg 이하, Tg 이상에서 평가 실험을 했다. 온도를 변화시킴으로써 촉각 센서의 유연성과 힘의 분포를 바꿀 수 있었다. 또한, 하중 형상 식별 실험에서는 Tg 이하와 비교해, Tg 이상에서 형상에 대해 선명한 힘의 분포를 얻을 수 있었다. 한편, 촉각 센서의 유연성을 변경함으로써 센서 상면에 실린 물체를 잘 미끄러지지 않게 하는 등 유지 성능의 향상을 확인할 수 있었다.
맺음말
이 글에서는 온도에 따라 강성이 변화하고 형상고정성, 형상회복성을 갖는 SMP를 로봇에 응용한 사례에 대해 소개했다. 앞으로는 개발한 유연성과 감도를 가변하는 로봇팔을 이용해 기존에 없던 로봇의 움직임․용도를 제안․검증해 가고 싶다. 또한, 기존부터 개발되어 실적이 있는 가변 강성 방법을 추가, 대체하는 것도 검토하고 있다.
高嶋 一登, 규슈공업대학 대학원 생명체공학연구과